
Keywords
Computer Science and Digital Science
- A3.4.1. Supervised learning
- A3.4.3. Reinforcement learning
- A3.4.4. Optimization and learning
- A3.4.5. Bayesian methods
- A3.4.6. Neural networks
- A3.4.8. Deep learning
- A5.4.4. 3D and spatio-temporal reconstruction
- A5.4.5. Object tracking and motion analysis
- A5.4.7. Visual servoing
- A5.10.2. Perception
- A5.10.3. Planning
- A5.10.4. Robot control
- A5.10.5. Robot interaction (with the environment, humans, other robots)
- A5.10.6. Swarm robotics
- A5.10.7. Learning
- A6.2.3. Probabilistic methods
- A6.2.4. Statistical methods
- A6.2.5. Numerical Linear Algebra
- A6.2.6. Optimization
- A6.4.2. Stochastic control
- A6.4.3. Observability and Controlability
- A6.4.4. Stability and Stabilization
- A6.4.6. Optimal control
- A7.1.4. Quantum algorithms
- A8.2. Optimization
- A8.3. Geometry, Topology
- A8.11. Game Theory
- A9.2. Machine learning
- A9.5. Robotics
- A9.6. Decision support
- A9.10. Hybrid approaches for AI
Other Research Topics and Application Domains
- B5.1. Factory of the future
- B5.6. Robotic systems
- B7.2. Smart travel
- B7.2.1. Smart vehicles
- B7.2.2. Smart road
- B8.2. Connected city
1 Team members, visitors, external collaborators
Research Scientists
- Ezio Malis [Team leader, INRIA, Senior Researcher, HDR]
- Philippe Martinet [INRIA, Senior Researcher, HDR]
- Patrick Rives [INRIA, Emeritus, HDR]
Post-Doctoral Fellow
- Stephane Durand [Inria, from Jun 2022 until Nov 2022]
PhD Students
- Emmanuel Alao [UTC Compiegne, from Oct 2022, Co-supervision]
- Matteo Azzini [UNIV COTE D'AZUR, from Oct 2022]
- Enrico Fiasche [DS4H, from Oct 2022]
- Stefan Larsen [INRIA, from Oct 2022]
- Fabien Lionti [INRIA, from Oct 2022]
- Ziming Liu [INRIA]
- Diego Navarro Tellez [CEREMA]
- Mathilde Theunissen [LS2N Nantes, from Nov 2022, Co-supervision]
Technical Staff
- Emmanuel Alao [INRIA, Engineer, until Aug 2022]
- Nicolas Chleq [INRIA]
- Pierre Joyet [INRIA, Engineer, from Nov 2022]
- Quentin Louvel [INRIA, Engineer, from Nov 2022]
Interns and Apprentices
- Matteo Azzini [INRIA, Intern, from Feb 2022 until Aug 2022, Master 2]
- Clervie Causer [INRIA, Intern, from Jun 2022 until Aug 2022]
- Enrico Fiasche [INRIA, Intern, from Feb 2022 until Aug 2022, Master 2]
- Priyanga Kalyanakumar [INRIA, Intern, from Feb 2022 until Aug 2022, Master 2]
- Thibaud Penning [INRIA, Intern, from Jun 2022 until Jul 2022, Master 1]
Administrative Assistant
- Patricia Riveill [INRIA]
2 Overall objectives
The goal of ACENTAURI is to study and to develop intelligent, autonomous and mobile robots that collaborate between them to achieve challenging tasks in dynamic environments. The team focuses on perception, decision and control problems for multi-robot collaboration by proposing an original hybrid model-driven / data driven approach to artificial intelligence and by studying efficient algorithms. The team focuses on robotic applications like environment monitoring and transportation of people and goods. In these applications, several robots will share multi-sensor information eventually coming from infrastructure. The team will demonstrate the effectiveness of the proposed approaches on real robotic systems like cars AGVs and UAVs together with industrial partners.
The scientific objectives that we want to achieve are to develop:
- robots that are able to perceive in real-time through their sensors unstructured and changing environments (in space and time) and are able to build large scale semantic representations taking into account the uncertainty of interpretation and the incompleteness of perception.The main scientific bottlenecks are (i) how to exceed purely geometric maps to have semantic understanding of the scene and (ii) how to share these representations between robots having different sensomotoric capabilities so that they can possibly collaborate together to perform a common task.
- autonomous robots in the sense that they must be able to accomplish complex tasks by taking high-level cognitive-based decisions without human intervention. The robots evolve in an environment possibly populated by humans, possibly in collaboration with other robots or communicating with infrastructure (collaborative perception). The main scientific bottlenecks are (i) how to anticipate unexpected situations created by unpredictable human behavior using the collaborative perception of robots and infrastructure and (ii) how to design robust sensor-based control law to ensure robot integrity and human safety.
- intelligent robots in the sense that they must (i) decide their actions in real-time on the basis of the semantic interpretation of the state of the environment and their own state (situation awareness), (ii) manage uncertainty both on sensor, control and dynamic environment (iii) predict in real-time the future states of the environment taking into account their security and human safety, (iv) acquire new capacities and skills, or refine existing skills through learning mechanisms.
- efficient algorithms able to process large amount of data and solve hard problems both in robotic perception, learning, decision and control. The main scientific bottlenecks are (i) how to design new efficient algorithms to reduce the processing time with ordinary computers and (ii) how to design new quantum algorithms to reduce the computational complexity in order to solve problems that are not possible in reasonable time with ordinary computers.
3 Research program
The research program of ACENTAURI will focus on intelligent autonomous systems, which require to be able to sense, analyze, interpret, know and decide what to do in the presence of dynamic and living environment. Defining a robotic task in a living and dynamic environment requires to setup a framework where interactions between the robot or the multi-robots system, the infrastructure and the environment can be described from a semantic level to a canonical space at different levels of abstraction. This description will be dynamic and based on the use of sensory memory and short/long term memory mechanism. This will require to expand and develop (i) the knowledge on the interaction between robots and the environment (both using model-driven or data-driven approaches), (ii) the knowledge on how to perceive and control these interactions, (iii) situation awareness, (iv) hybrid architectures (both using model-driven or data-driven approaches), for monitoring the global process during the execution of the task.
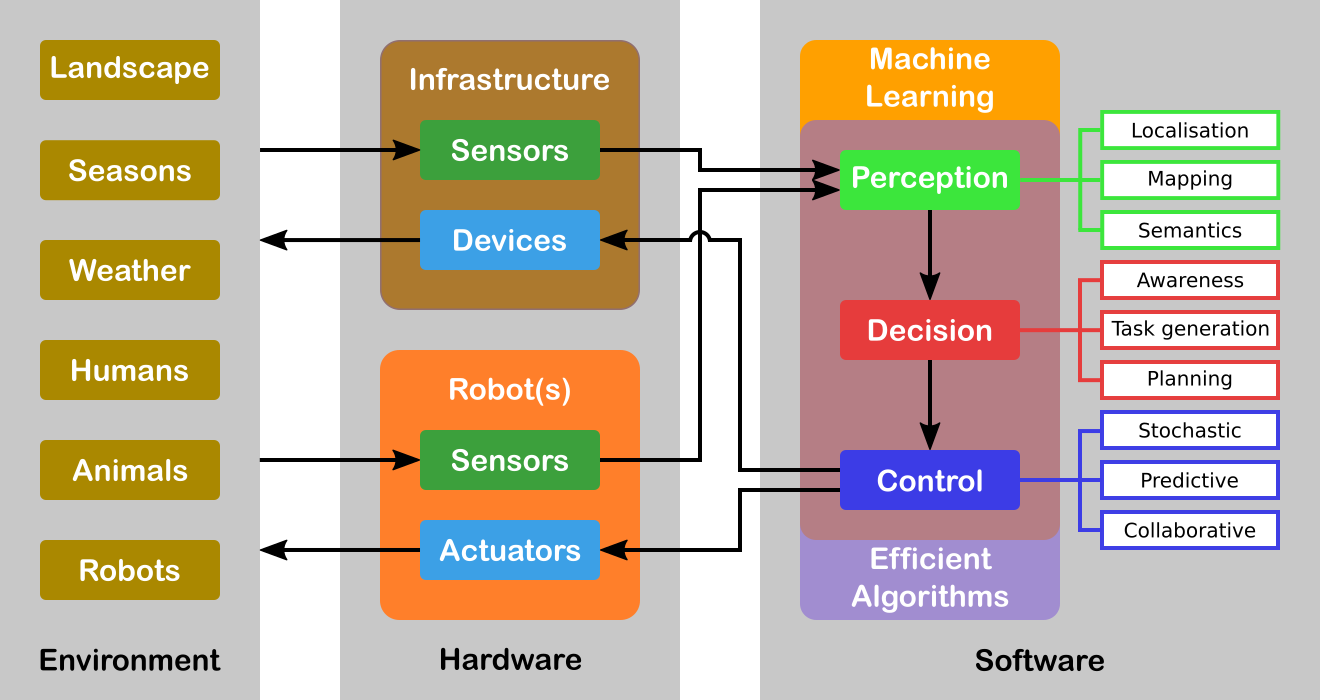
Figure 1 illustrates an overview of the global systems highlighting the core topics. For the sake of simplicity, we will decompose our research program in three axes related to Perception, Decision and Control. However, it must be noticed that these axes are highly interconnected (e.g. there is a duality between perception and control) and all problems should be addressed in a holistic approach. Moreover, Machine Learning is in fact transversal to all the robot's capacities. Our objective is the design and the development of a parameterizable architecture for Deep Learning (DL) networks incorporating a priori model-driven knowledge. We plan to do this by choosing specialized architectures depending on the task assigned to the robot and depending on the input (from standard to future sensor modalities). These DL networks must be able to encode spatio-temporal representations of the robot's environment. Indeed, the task we are interested in considers evolution in time of the environment since the data coming from the sensors may vary in time even for static elements of the environment. We are also interested to develop a novel network for situation awareness applications (mainly in the field of autonomous driving, and proactive navigation).
Another transversal issue concerns the efficiency of the algorithms involved. Either we must process a large amount of data (for example using a standard full HD camera (1920x1080 pixels) the data size to process is around 5 Terabits/hour) or the problem is hard to solve (for example path optimization problems for multiple robots are all NP-complete, even when the underlying graph is planar. A particular emphasis will be given to efficient numerical analysis algorithms (in particular for optimization) that are omnipresent in all research axes. We will also explore a completely different and radically new methodology with quantum algorithms. Several quantum basic linear algebra subroutines (BLAS) (Fourier transforms, finding eigenvectors and eigenvalues, solving linear equations) exhibit exponential quantum speedups over their best known classical counterparts. This quantum BLAS (qBLAS) translates into quantum speedups for a variety of algorithms including linear algebra, least-squares fitting, gradient descent, Newton's method. The quantum methodology is completely new to the team, therefore the practical interest of pursuing such research direction should be validated in the long-term.
The research program of ACENTAURI will be decomposed in the following three research axes:
3.1 Axis A: Augmented spatio-temporal perception of complex environments
The long-term objective of this research axis is to build accurate and composite models of large-scale environments that mix metric, topological and semantic information. Ensuring the consistency of these various representations during the robot exploration and merging/sharing observations acquired from different viewpoints by several collaborative robots or sensors attached to the infrastructure, are very difficult problems. This is particularly true when different sensing modalities are involved and when the environments are time-varying. A recent trend in Simultaneous Localization And Mapping is to augment low-level maps with semantic interpretation of their content. Indeed, the semantic level of abstraction is the key element that will allow us to build the robot’s environmental awareness (see Axis B). For example, the so-called semantic maps have already been used in mobile robot navigation, to improve path planning methods, mainly by providing the robot with the ability to deal with human-understandable targets. New studies to derive efficient algorithms for manipulating the hybrid representations (merging, sharing, updating, filtering) while preserving their consistency are needed for long-term navigation.
3.2 Axis B: Situation awareness for decision and planning
The long-term objective of this research axis is to design and develop a decision-making module that is able to (i) plan the mission of the robots (global planning), (ii) generate the sub-tasks (local objectives) necessary to accomplish the mission based on Situation Awareness and (iii) plan the robot paths and/or sets of actions to accomplish each subtask (local planning). Since we have to face uncertainties, the decision module must be able to react efficiently in real-time based on the available sensor information (on-board or attached to an IoT infrastructure) in order to guarantee the safety of humans and things. For some tasks, it is necessary to coordinate a multi-robots system (centralized strategy), while for other each robot evolves independently with its own decentralized strategy. In this context, Situation Awareness is at the heart of an autonomous system in order to feed the decision-making process, but also can be seen as a way to evaluate the performance of the global process of perception and interpretation in order to build a safe autonomous system. Situation Awareness is generally divided into three parts: perception of the elements in the environment (see Axis A), comprehension of the situation, and projection of future states (prediction and planning). When planning the mission of the robot, the decision-making module will first assume that the configuration of the multi-robot system is known in advance, for example one robot on the ground and two robots on the air. However, in our long-term objectives, the number of robots and their configurations may evolve according to the application objectives to be achieved, particularly in terms of performance, but also to take into account the dynamic evolution of the environment.
3.3 Axis C: Advanced multi-sensor control of autonomous multi-robot systems
The long-term objective of this research axis is to design multi-sensor (on-board or attached to an IoT infrastructure) based control of potentially multi-robots systems for tasks where the robots must navigate into a complex dynamic environment including the presence of humans. This implies that the controller design must explicitly deal not only with uncertainties and inaccuracies in the models of the environment and of the sensors, but also to consider constraints to deal with unexpected human behavior. To deal with uncertainties and inaccuracies in the model, two strategies will be investigated. The first strategy is to use Stochastic Control techniques that assume known probability distribution on the uncertainties. The second strategy is to use system identification and reinforcement learning techniques to deal with differences between the models and the real systems. To deal with unexpected human behavior, we will investigate Stochastic Model Predictive Control (MPC) techniques and Model Predictive Path Integral (MPPI) control techniques in order to anticipate future events and take optimal control actions accordingly. A particular emphasis will be given to the theoretical analysis (observability, controllability, stability and robustness) of the control laws.
4 Application domains
ACENTAURI focus on two main applications in order to validate our researches using the robotics platforms described in section 7. We are aware that ethical questions may arise when addressing such applications. ACENTAURI follows the recommendations of the Inria ethical committee like for example confidentiality issues when processing data (RGPD).
4.1 Environment monitoring with a collaborative robotic system
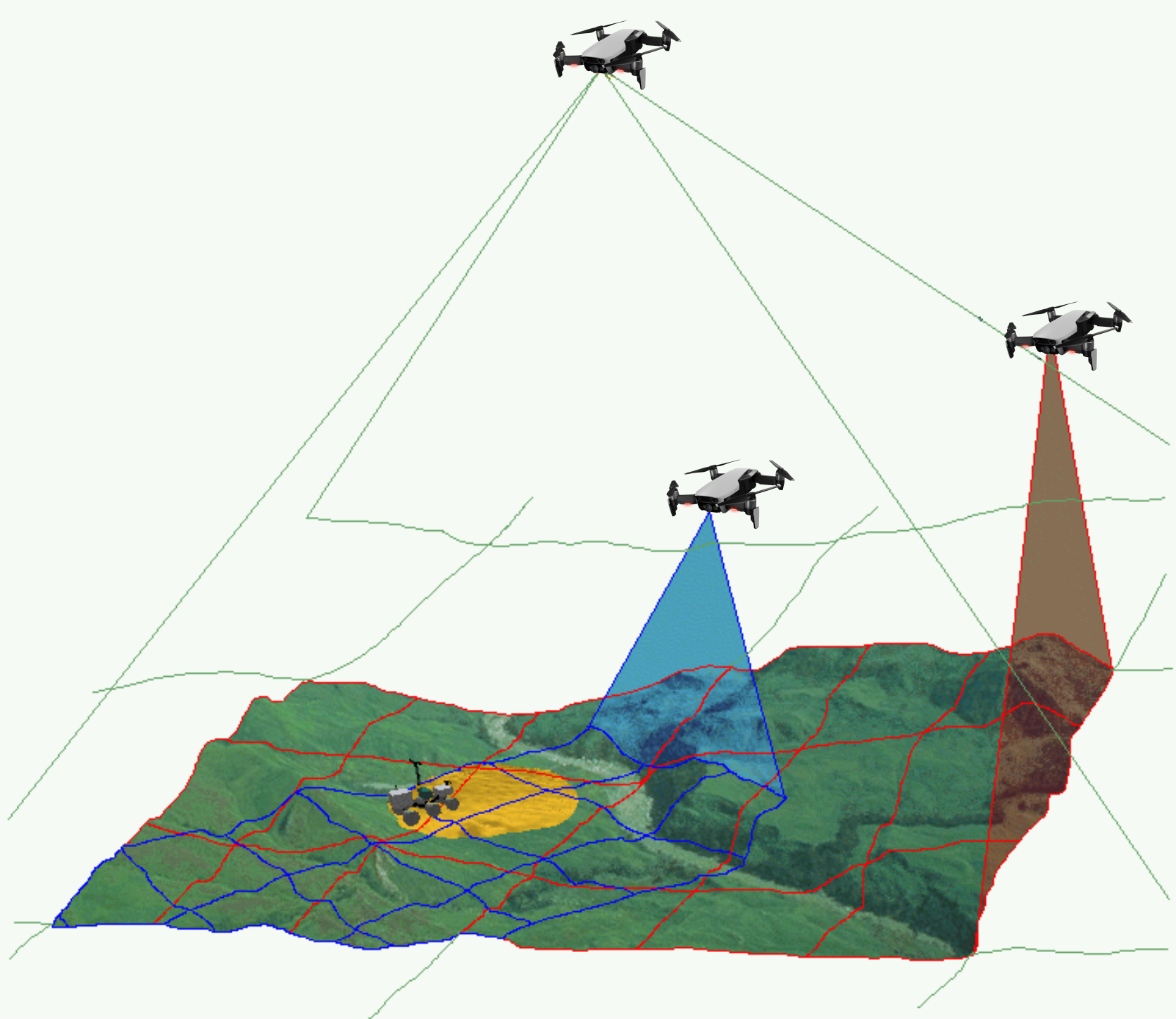
The first application that we will consider, concerns monitoring the environment using an autonomous multi-robots system composed by ground robots and aerial robots. The ground robots will patrol following a planned trajectory and will collaborate with the aerial drones to perform tasks in structured (e.g. industrial sites), semi-structured (e.g. presence of bridges, dams, buildings) or unstructured environments (e.g. agricultural space, forest space, destroyed space). In order to provide a deported perception to the ground robots an aerial drone will be in operation while the second one will be recharging its batteries on the ground vehicle. Coordinated and safe autonomous take-off and landing of the aerial drones will be a key factor to ensure the continuity of service for a long period of time. Such a multi-robot system can be used to localize survivors in case of disaster or rescue, to localize and track people or animals (for surveillance purpose), to follow the evolution of vegetation (or even invasion of insects or parasites), to follow evolution of structures (bridges, dams, buildings, electrical cables) and to control actions in the environment like for example in agriculture (fertilization, pollination, harvesting, ...), in forest (rescue), in land (planning firefighting). To successfully achieve such an application will require to build a representation of the environment and localize the robots in the map (see Axis A in section 3.1), to re-plan the tasks of each robot when unpredictable events occurs (see Axis B in section 3.2) and to control each robot to execute the tasks (see Axis C in section 3.3). Depending on the application field the scale and the difficulty of the problems to be solved will be increasing. In the Smart Factories field, we have a relatively small size environment, mostly structured and with the possibility to communicate with and highly instrumented (sensors) and connected environment. In the Smart Territories field, we have large semi-structured or unstructured environments that are not instrumented. To set up demonstrations of this application, we intend to collaborate with industrial partners and local institutions. For example, we plan to set up a collaboration with the Parc Naturel Régional des Prealpes d'Azur to monitor the evolution of fir trees infested by bark beetles.
4.2 Transportation of people and goods with autonomous connected vehicles
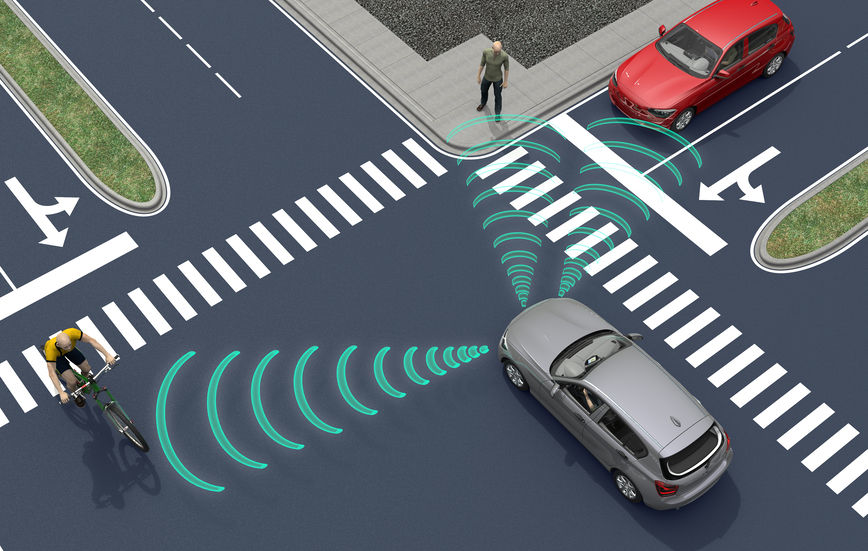
The second application that we will consider, concerns the transportation of people and goods with autonomous connected vehicles. ACENTAURI will contribute to the development of Autonomous Connected Vehicles (e.g. Learning, Mapping, Localization, Navigation) and the associated services (e.g. towing, platooning, taxi). We will develop efficient algorithms to select on-line connected sensors coming from the infrastructure in order to extend and enhanced the embedded perception of a connected autonomous vehicle. In cities, there exists situations where visibility is very bad for historical reason or simply occasionally because of traffic congestion, service delivery (trucks, buses) or roadworks. It exists also situation where danger are more important and where a connected system or intelligent infrastructure can help to enhance perception and then reduce the risk of accident (see Axis A in section 3.1). In ACENTAURI, we will also contribute to the development of assistance and service robotics by re-using the same technologies required in autonomous vehicles. By adding the social level in the representation of the environment, and using techniques of proactive and social navigation, we will offer the possibility of the robot to adapt its behavior in presence of humans (see Axis B in section 3.2). ACENTAURI will study sensing technology on SDVs (Self-Driving Vehicles) used for material handling to improve efficiency and safety as products are moved around Smart Factories. These types of robots have the ability to sense and avoid people, as well as unexpected obstructions in the course of doing its work (see Axis C in section 3.3). The ability to automatically avoid these common disruptions is a powerful advantage that keeps production running optimally. To set up demonstrations of this application, we will continue the collaboration with industrial partners (Renault) and with the Communauté d'Agglomération Sophia Antipolis (CASA). Experiments with 2 autonomous Renault Zoe cars will be carried out in a dedicated space lend by CASA. Moreover, we propose, with the help of the Inria Service d'Expérimentation et de Développement (SED), to set up a demonstration of an autonomous shuttle to transport people in the future extended Inria/UCA site.
5 Social and environmental responsibility
ACENTAURI is concerned with the reduction of the environmental footprint the team's activities and it is involved in several research projects related to the environmental challenges.
5.1 Footprint of research activities
The main footprint of our research activities comes from travels and power consumption (computers and computer cluster). Concerning travels, due to the COVID-19 pandemic they have been considerably limited. Concerning power consumption, besides classical actions to reduce the waste of energy, our research focus on efficient optimization algorithms to minimize the computation time of computers onboard of our robotic platforms.
5.2 Impact of research results
We have planned to propose several projects related to the environmental challenges. We give below two examples of the most advanced projects that have been accepted in 2022.
The first concerns the monitoring of forest in collaboration with the Parc Naturel Regional des Préalpes d'Azur, ONF and DRAAF (see project EPISUD in section 10.5).
The second concerns the autonomous vehicles in agricultural application in collaboration with INRAE Clermont-Ferrand in the context of the PEPR "Agrologie et numérique". We aims to develop robotic approaches for the realization of new cultural practices, capable of acting as a lever for agroecological practices (see project NINSAR in section 10.4). .
6 Highlights of the year
- P. Martinet has been integrated as Director of Research (DR0) at Inria, following his long period secondment (5 years) ended in October 2022.
- ACENTAURI has participated to the AgrifoodTEF proposal as a member of french node in the call DIGITAL-2022-CLOUD-AI-02 (Topic: DIGITAL-2022-CLOUD-AI-02-TEF-AGRIFOOD). The project has been accepted. P. Martinet is the local coordinator of the project.
- The Ninsar project proposed in the framework of the PEPR Agroecology & ICT has been submitted and accepted. It gathers the robotic community working in agriculture. P. Martinet is the coordinator of the project.
- The patent FR2108170 filed in July 2021 (Patent title : Emergency trajectory planning with minimal criticity, Inventors : Anh-Lam DO, Christian LAUGIER, Philippe MARTINET, Luiz-Alberto SERAFIM-GUARDINI, Anne SPALANZANI) and winner of the « Most Promising » price at Renault SA, has been delivered in France in 2022.
7 New software and platforms
ACENTAURI develops andmaintains the following robotic platforms and software.
Concerning the robotic platforms:
- The ICAV platform composed, to date, by 2 autonomous cars (AGV) and one instrumented car.
- The DRONIX platform to date composed, to date, by a flying room equipped with a Qualysis localization system and 2 drones (UAV).
Concerning the software platforms, it concerns:
- The Perception360 software is a collection of libraries and applications for robot vision-based localization with omnidirectional RGB-D sensors or standard perspective cameras.
7.1 New software
7.1.1 Perception360
-
Name:
Robot vision and 3D mapping with omnidirectional RGB-D sensors.
-
Keywords:
Depth Perception, Localization, 3D reconstruction, Realistic rendering, Sensors, Image registration, Robotics, Computer vision, 3D rendering
-
Functional Description:
This software is a collection of libraries and applications for robot vision and 3D mapping with omnidirectional RGB-D sensors or standard perspective cameras. This project provides the functionality to do image acquisition, semantic annotation, dense registration, localization and 3D mapping. The omnidirectional RGB-D sensors used within this project have been developed in INRIA Sophia-Antipolis by the team LAGADIC. Modifications to the software have been made by the ACENTAURI team in order to make certain features of the software easily accessible in the form of a library.
-
Contact:
Nicolas Chleq
7.2 New platforms
Participants: Ezio Malis, Philippe Martinet, Nicolas Chleq, Emmanuel Alao, Quentin Louvel.
ICAV platform
ICAV platform has been funded by PUV@SOPHIA project (CASA, PACA Region and state), self funding, Digital Reference Center from UCA, and Accademy 1 from UCA. We have now two autonomous vehicles, one instrumented vehicle, many sensors (RTK GPS, Lidars, Cameras), Communications devices (C-V2X, IEEE 802.11p), and one standalone localization and mapping system.
ICAV platform is composed of
- ICAV1 is an old generation of ZOE. It has been bought fully robotized and intrumented. It is equiped with Velodyne Lidar VLP16, low cost IMU and GPS, three cameras and one embedded computer.
- ICAV2 is a new generation of ZOE which has been instrumented and robotized in 2021. It is equiped with Velodyne Lidar VLP16, low cost IMU and GPS, three cameras, two solidstate Lidars RS-M1, one embedded computer and one NVIDIA Jetson AGX Xavier.
- ICAV3 will be instrumented with different LIDARS and multi cameras system (LADYBUG5+)
- A ground truth RTK system. An RTK GPS base station has been installed and a local server configured inside the Inria Center. Each vehicle is equiped with an RTK GPS receiver and connected to a local server in order to compute a centimeter localization accuracy.
- A standalone localization and mapping system. This system is composed of a Velodyne Lidar VLP16, low cost IMU and GPS, and one NVIDIA Jetson AGX Xavier.
- A communication system V2X based on the technology C-V2X and IEEE 802.11p.
- Different lidar sensors (Ouster OS2-128, RS-LIDAR16, RS-LIDAR32, RS-Ruby), and one multi-cameras system (LADYBUG5+)
The main applications of this platform are:
- datasets acquisition
- localization, Mapping, Depth estimation, Semantization
- autonomous navigation (path following, parking, platooning, ...), proactive navigation in shared space
- situation awareness and decision making
- V2X communication
- autonomous landing of UAVs on the roof



ICAV2 has been used by Maria Kabtoul in order to demonstrate the effectiveness of autonomous navigation of a car in a crowd.
Indoor autonomous mobile platform
The mobile robot platform has been funded by the MOBIDEEP project in order to demonstrate autonomous navigation capabilities in emcumbered and crowded environment. This platform is composed of:
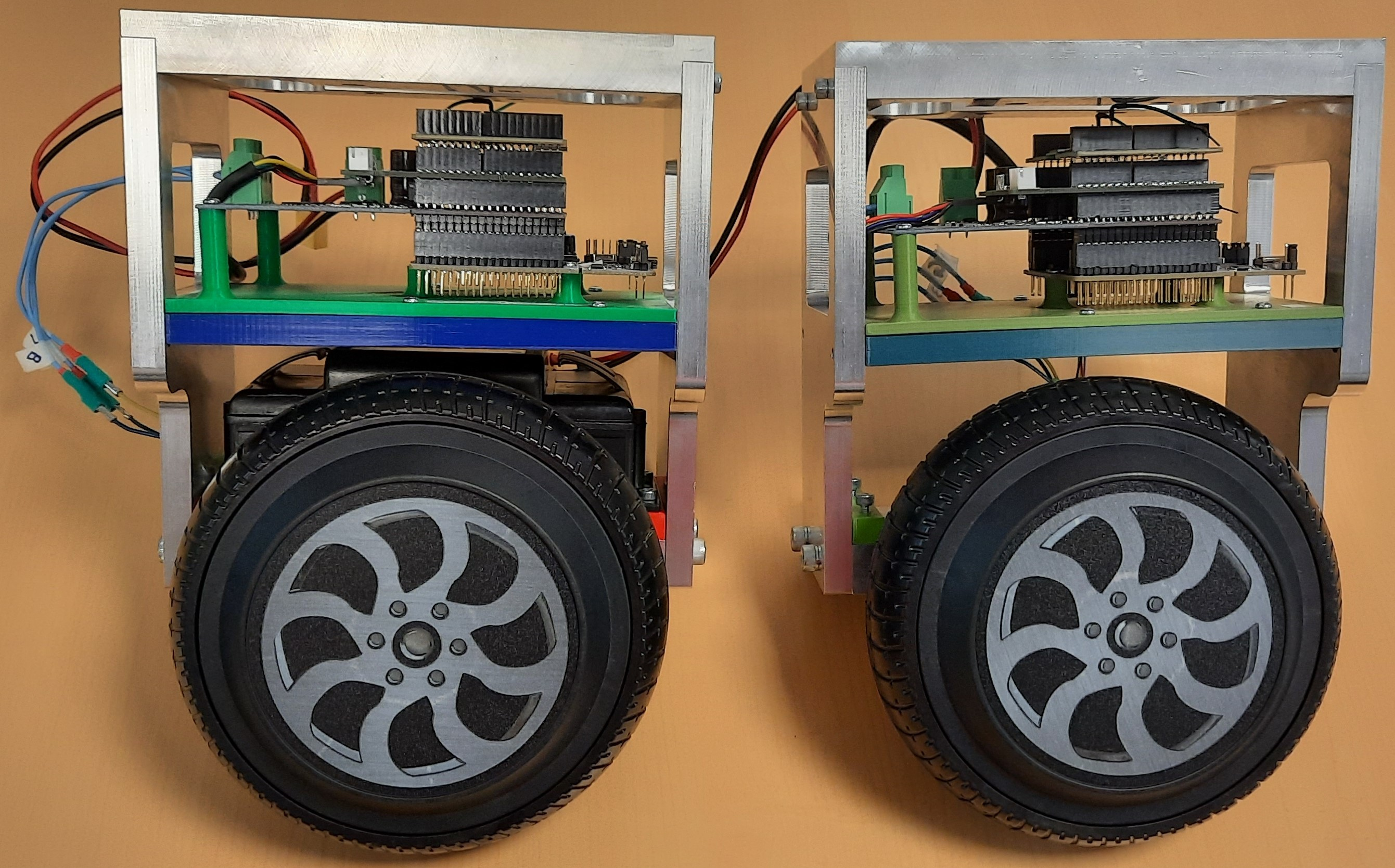
- one omnidirectional mobile robot (SCOOT MINI with mecanum wheels from AGIL-X)
- one NVIDIA Jetson AGX Xavier for deep learning algorithm implementation
- one general labtop
- one Robosense RS-LIDAR16
- one Ricoh Z1 360° camera
- one Sony RGB-D D455 camera

The main applications of this platform are:
- indoor datasets acquisition
- localization, Mapping, depth estimation, Semantization
- proactive navigation in shared space
- pedestrian detection and tracking
This platform is used in MOBI-DEEP project for integration of different work from the consortium. It is used to demonstrate new results on social navigation.
E-Wheeled platform
E-WHEELED is an AMDT Inria project (2019-22) coordinated by Philippe Martinet. The aim is to provide mobility to things by implementing connectivity techniques. It makes available an Inria expert engineer (Nicolas Chleq) in ACENTAURI in order to demonstrate the Proof of Concept using a small size demonstrator. Due to the COVID19, the project has been delayed.
8 New results
Automous parking using multi sensor based approach
Participants: David Perez Gonzalez (LS2N), Olivier Kermorgant (LS2N), Salvador Dominguez Quijada (LS2N), Philippe Martinet.
Autonomous parking has been mainly addressed from a path planning point of view, and not often in a generic way to deal with all kind for all types of parking maneuvers (perpendicular, diagonal for both forward and backward motions and parallel for backward motions). An alternative way is to address the parking problem from a control of view. The main problems to be solved are to find an empty spot, to parametrize the autonomous parking framework for the type of parking, and to adapt the behavior in regard with the dynamic evolution of the environment. Generally, not all that point are taken into account in the state of the art solution. To address all the mentioned problems, we have proposed a single common Multi-Sensor-Based Predictive Control framework 9 in the context of the PhD of David Perez Morales.
The contribution of this work is the formalization of parking operations under a common MSBPC framework allowing the vehicle to park autonomously into perpendicular and diagonal parking spots with both forward and backward motions and into parallel ones with backward motions. By considering an additional auxiliary subtask and a predictive approach, the presented technique is capable of performing multiple maneuvers (if necessary) in order to park successfully in constrained workspaces. The auxiliary subtask is a key since it allows to account for the potential motions that go essentially against the final goal (i.e. drive the vehicle away from the parking spot) but that at the end allows to park successfully.
Autonomous navigation in human populated environment
Participants: Maria Kabtoul, Anne Spalanzani, Philippe Martinet.
The work 6 is focused on developing a navigation system for autonomous vehicles operating around pedestrians. The suggested solution is a proactive framework capable of anticipating pedestrian reactions and exploiting their cooperation to optimize the performance while ensuring pedestrians safety and comfort. A cooperation-based model for pedestrian behaviors around a vehicle is proposed. The model starts by evaluating the pedestrian tendency to cooperate with the vehicle by a time-varying factor. This factor is then used in combination with the space measurements to predict the future trajectory.
The model is exploited in the navigation system to control both the velocity and the local steering of the vehicle. Firstly, the longitudinal velocity is proactively controlled. Two criteria are considered to control the longitudinal velocity. The first is a safety criterion using the minimum distance between an agent and the vehicle’s body. The second is proactive criterion using the cooperation measure of the surrounding agents. The latter is essential to exploit any cooperative behavior and avoid the freezing of the vehicle in dense scenarios. Finally, the optimal control is derived using the gradient of a cost function combining the two previous criteria.
Minimizing risk injury in motion planning
Participants: Luis Guardini, Anne Spalanzani (CHROMA), Philippe Martinet, Christian Laugier (CHROMA), Anh-Lam Do (Renault).
In motion planning, generally the main goal is to find a safe path free from any collision. If this appears clear and moreless easy in static environment, it is no more the case when we consider dynamic human populated environment. The main problems remains to take into account unexpected event which occur most of time from the human side and few time from natural phenomena, or to face situations where the environment is unknown and/or not fully observable. In all these situations, it is difficult to warranty fully global safety among one horizon of prediction, except being very conservative. Then it exists a risk of collision that must be taken into account. Among the research work done recenty, some have considered the evaluation of the injury risk associated with a particular and global situation, and the Probability of Collision with Injury Risk (PCIR) has been defined, making collision mitigation an important element in motion planning.
Despite the rich number of functionalities of Advanced Driver-Assistance Systems (ADAS), there is still a gap on finding a way to evaluate the best decision globally.
This work presents a novel motion planning framework 8 to generate emergency maneuvers in complex and risky scenarios using active mitigation. The classical MPPI algorithm is improved to be used in a probabilistic dynamic cost map under limited perception range. A cost map with global probability of injury to all road users is used as a constraint to the problem in order to compute target selection based on the global minimum risk considering all road users. Real experiments introduce the use of virtual objects by merging simulation and real sensor data to safely produce collision and mitigation experiments. Results show that the proposed algorithm can perform correctly, by finding collision free trajectories in complex scenarios and compute viable target selection that minimizes global injury risk when collision is inevitable.
Representation of the environment in autonomous driving applications
Participants: Ziming Liu, Ezio Malis, Philippe Martinet.
Visual odometry is an important task for the localization of autonomous robots and several approaches have been proposed in the literature. We consider visual odometry approaches that use stereo images since the depth of the observed scene can be correctly estimated. These approaches do not suffer from the scale factor estimation problem of monocular visual odometry approaches that can only estimate the translation up to a scale factor. Traditional model-based visual odometry approaches are generally divided into two steps. Firstly, the depths of the observed scene are estimated from the disparity obtained by matching left and right images. Then, the depths are used to obtain the camera pose. The depths can be computed for selected features like in sparse methods or for all possible pixels in the image like in dense direct methods 1.
Recently, more and more end-to-end deep learning visual odometry approaches have been proposed, including supervised and unsupervised models. However, it has been shown that hybrid visual odometry approaches can achieve better results by combining a neural network for depth estimation with a model-based visual odometry approach. Moreover, recent works have shown that deep learning based approaches can perform much better than the traditional stereo matching approaches and provide more accurate depth estimation.
State-of-the-art supervised stereo depth estimation networks can be trained with the ground truth disparity (depth) maps. However, ground truth depth maps are extremely difficult (almost impossible for dense depth maps) to be obtained for all pixels in real and variable environments. Therefore, some works explore to train a model on simulated environments and reduce its gap with the real world data. However, there are only few works focusing on unsupervised stereo matching. Besides using the ground truth depth maps or unsupervised training, we can also build temporal images reconstruction loss with ground truth camera pose which is easy to be obtained.
The main contributions of our work published in 7 are (i) a novel pose-supervised network (that is named PDENet) for dense stereo depth estimation, that can achieve the SOTA results without ground truth depth maps and (ii) a dense hybrid stereo visual odometry system, which combines the deep stereo depth estimation network with a robust model-based Dense Pose Estimation module (that is named DPE).
This year we address the problem of increasing the precision of the proposed. Indeed, machine learning methods generate hallucinated depths even in areas where it is impossible to estimate the depth due to several reasons, like occlusions, homogeneous areas, etc. Generally, this produces wrong depth estimation that leads to errors in odometry estimation. To avoid this problem, we propose a new approach to generate multiple masks that will be combined to discard wrong pixels and therefore increase the accuracy of visual odometry. Our key contribution is to use the multiple masks not only in the odometry computation but also to improve the learning of the neural network for depth map generation. Experiments on several datasets show that masked dense direct stereo visual odometry provides much more accurate results than previous approaches in the literature. This work has been submitted to ICRA (International Conference on Robotics and Automation).
Situation Awareness and Decision Making for autonomous driving in urban environment
Participants: Priyanga Kalyanakumar, Philippe Martinet, Ezio Malis.
Autonomous vehicles more commonly known as self-driving cars, have received a lot of attention in recent years. Many stakeholders such as Google, Uber, Tesla and so forth have invested in development and testing their own autonomous driving cars. The challenge to make an autonomous car which is not only limited to performance like any classic cars but also takes into account safety of the passengers and pedestrians. Despite achieving multiple milestones with regards to development of technologies, autonomous driving is still an active research area and still requires more experimentation and making architecture before becoming entirely autonomous. The intriguing area of self-driving car motivates the author to research more about this self-driving technology. This thesis aims to achieve key aspects of Situation Awareness in which the autonomous vehicles has the ability to recognize the existing situation and predict how the situation evolve in the future. We designed an architecture to understand the driving scene along with the behavior of vehicles and predict their future trajectories. A novel ontology-based semantic knowledge with driver behavior model is proposed to enhance the performance of the future trajectory prediction using the Long Short-Term Memory encoder decoder with attention approach. The designed ontology describes semantic knowledge about entities and features and their relation in the driving context. The driver behavior model identifies the vehicle behavior using Machine Learning algorithms. By utilizing the ontology, behavior model and vehicle trajectory information as input the model shows an satisfactory performance in predicting the future position and velocity of the vehicles.
Autonomous navigation in human populated environment
Participants: Enrico Fiasché, Philippe Martinet, Ezio Malis.
Recently, robots are widely used around humans, in homes and in public, due to their advantages. In order to allow the robot and human to share the same space under natural interaction, the ability for robot to generate a socially acceptable trajectory is the key step. Autonomous robots find difficult to navigate in a crowded environment due to high level of uncertainty caused by dynamic agents present in the environment. This uncertainty leads to the so called Freezing Robot Problem (FRP). Many of the state-of-the-art techniques used to solve this problem, involving collaboration between humans and robots, are studied.
This work focuses on the control aspects of the autonomous navigation in human populated environment, using models that are able to predict the future outputs over a certain prediction time horizon, considering the social model for the pedestrian. Rather than of letting the robot move passively to avoid people, the aim of the master thesis is to ensure safe and secure navigation in which the robot has a proactive role agents and AV collaboration. In particular, the master thesis studied and analyzed the Model Predictive Control (MPC) technique, focusing on the performances. Different types of Control Parameterization were used and compared in order to meet real-time feasibility. The Social Force Model (SFM) is used to predict the pedestrian motions. Simulations and experiments were carried out and evaluated in different types of social scenarios, demonstrating that the proactive navigation provided by the model is able to generate secure and safe trajectories avoiding the Freezing Robot Problem.
UAV/AGV collaboration for continuous service
Participants: Matteo Azzini, Ezio Malis, Philippe Martinet.
A collaborative multi-robot system made up of ground and aerial vehicles presents numerous advantages for applications including surveillance, precision agriculture, or wildfire detection and fighting. Alternating autonomous UAVs (Unmanned Aerial Vehicle) could solve the problem of low battery life presented by such aerial vehicles, utilising the ground vehicle as moving recharging station, while not compromising the tasks being carried out by the robots on which the platforms sit, thus improving the autonomy and lifetime of the overall systems.
Previous study already designed an autonomous take-off and landing system, taking into account also external disturbances. The novelty in this work is to present a system based on the fusion of data coming from the camera with gimbal mechanism, IMU, gyroscope, GPS and UWB in order to develop a framework able to perform a continuous and robust relative localization of the aerial vehicle with respect to the moving landing platform. Furthermore, a gimbal mechanism control will be presented based on the localization information previously mentioned. Finally, the UWB technology has been tested in order to find a configuration that allow to extract not only the position, but also the attitude of the UAV with respect to the AGV.
Complete closed-form and accurate solution to pose estimation from 3D correspondences
Participants: Ezio Malis.
Computing the pose from 3D data acquired in two different frames is of high importance for several robotic tasks like odometry, SLAM and place recognition. The pose is generally obtained by solving a least-squares problem given points-to-points, points-to-planes or points to lines correspondences. The non-linear least-squares problem can be solved by iterative optimization or, more efficiently, in closed-form by using solvers of polynomial systems.
In this work, a complete and accurate closed-form solution for a weighted least-squares problem has been studied. Adding weights for each correspondence allow to increase robustness to outliers. Contrary to existing methods, the proposed approach is complete since it is able to solve the problem in any non-degenerate case and it is accurate since it is guaranteed to find the global optimal estimate of the weighted least-squares problem. The key contribution of this work is the combination of a robust u-resultant solver with the quaternion parametrisation of the rotation, that was not considered in previous works. Simulations and experiments on real data demonstrate the superior accuracy and robustness of the proposed algorithm compared to previous approaches. This work has been submitted to RA-L.
Uncertainty-aware Navigation in Crowded Environment
Participants: Emmanuel Alao, Philippe Martinet.
Robots are now widely used around humans, in homes and public places like the museums, all due to their many benefits. These autonomous robots are called social or service robots and they always find it difficult to navigate in crowded environments; largely because of the high level of uncertainty in observing and predicting human behaviours in a highly dynamic environment. Uncertainty is propagated during prediction and might grow to levels that renders the whole environment unsafe for the robot leading to the so called Freezing Robot Problem (FRP).
This work 3 presents our proposed approach for solving navigation problems in a crowd with uncertainty by formalizing the problem as a stochastic model predictive problem enclosed in a dynamic channel. We first proposed a model that reduces the estimation errors in the state of the pedestrians in the robot local frame by accounting for the motion of the robot. Then we proceed to show how we formalize the control problem as a stochastic NMPC to reduce the occurrence of the freezing robot problem (FRP) by adding a proxemics objective function, a probability constraint and a dynamic channel to make the robot follow a collision free path in the crowd.
Using numerical optimization methods enables the planner to compute new control commands in realtime. The implementation results shows that the method performs better than the deterministic MPC.
Control Parameterization in Nonlinear Model Predictive Control
Participants: Franco Fusco, Guillaume Allibert, Philippe Martinet.
Model Predictive Control (MPC) is a very effective control technique when the prediction of the future behavior is possible. For instance, this allows to prevent from safety when navigating in a dynamic environment, and to anticipate the control according to the future behavior of the control system (taking into account lags, delays, perturbations, ...).
The computation time and complexity increase drastically according the length of the horizon of prediction and the number of degree of freedom of the control input. To decrease the numerical complexity of nonlinear MPC problems without necessarily affecting the performances significantly, use of control parameterization has been proposed in the literature. Tradeoffs between computational load and performances should be sought in order to meet real-time feasibility requirements. However, making the problem more tractable for the hardware should not necessarily imply a decrease in performances.
In this work, we review the use of parameterizations 4 and propose a Sequential Quadratic Programming algorithm for nonlinear MPC 5. The performances of the solver in simulation is benchmarked, showing that parameterizations allow to attain good performances with (significantly) lower computation times than state-of-the-art solvers.
9 Bilateral contracts and grants with industry
9.1 Bilateral contracts with industry
ACENTAURI is responsible of two research contracts with Naval Group (2022-2024).
Usine du Futur
Participants: Ezio Malis, Philippe Martinet, Pierre Alliez (TITANE).
The context is that of the factory of the future for Naval Group in Lorient, for submarines and surface vessels. As input, we have a digital model (for example of a frigate), the equipment assembly schedule and measurement data (images or Lidar). Most of the components to be mounted are supplied by subcontractors. At the output, we want to monitor the assembly site to compare the "as-designed" with the "as-built". The challenge of the contract is a need for coordination on the construction sites for the planning decision. It is necessary to be able to follow the progress of a real project and check its conformity using a digital twin. Currently, as you have to see on board to check, inspection rounds are required to validate the progress as well as the mountability of the equipment: for example, the cabin and the fasteners must be in place, with holes for the screws, etc. These rounds are time-consuming and accident-prone, not to mention the constraints of the site, for example the temporary lack of electricity or the numerous temporary assembly and safety equipment.
La Fontaine
Participants: Ezio Malis, Philippe Martinet, Stephane Durand, Pierre Joyet.
The context is that of decision support for a collaborative autonomous multi-agent system with a common objective and who try to get around ”obstacles” which, in turn, try to prevent them from reaching their goals. As part of a collaboration with NAVAL GROUP, we wish to study a certain number of issues related to the optimal planning and control of cooperative multi-agent systems. The objective of this contract is therefore to identify and test methods for generating trajectories responding to a set of constraints, dictated by the interests, the modes of perception, and the behavior of these actors. The first problem to study is that of the strategy to adopt during the game. The strategy consists in defining “the set of coordinated actions, skilful operations, maneuvers with a view to achieving a specific objective”. In In this framework, the main scientific issues are (i) how to formalize the problem (often as optimization of a cost function) and (ii) how to be able to define several possible strategies while keeping the same tools for implementation (tactics).
The second problem to study is that of the tactics to be followed during the game in order to implement the chosen strategy. The tactic consists in defining the tools to execute the strategy. In this context, we study the use of techniques such as MPC (Model Predictive Control) and MPPI (Model Predictive Path) Integral) which make it possible to predict the evolution of the system over a given horizon and therefore to take the best action decision based on knowledge at time t.
The third problem is that of combining the proposed approaches with those based on AI and in particular the machine learning. Machine Learning can intervene both in the choice of the strategy and in the development of tactics. The possibility of simulating a large number of parts could allow the learning of a neural network whose architecture remains to be designed.
10 Partnerships and cooperations
Participants: Ezio Malis, Philippe Martinet, Patrick Rives.
10.1 International initiatives
10.1.1 Associate Teams in the framework of an Inria International Lab or in the framework of an Inria International Program
A proposal for an Associate team has been submitted in October 2022. The AISENSE (Artificial intelligence for advanced sensing in autonomous vehicles) associate team has been proposed jointly with the AVELab at KAIST in Korea.
10.2 International research visitors
10.2.1 Visits to international teams
Research stays abroad
- A short visit (2 days) of the Regional Center of Excellence for Robotic Technology in Zagreb has been done by Philippe Martinet in November 2022.
10.3 European initiatives
10.3.1 Other european programs/initiatives
ACENTAURI is part of the euROBIN, the Network of Excellence on AI and robotics (2021-2024. A collaboration with the LARSEN team at Inria Nancy is under definition. We plan to propose a Master 2 internship to work on the advanced control control methods for autonomous navigation of a mobile platform in a human populated environment.
10.4 National initiatives
ANR projects
- HIANIC: (2018-2022) Human Inspired Autonomous Navigation In Crowds: Inria (CHROMA, R-ITS), LS2N. (P. Martinet). In collaboration with CHROMA (Anne Spalnazani), we are involved in Human cooperability estimation Vehicle Human interaction, and Proactive navigation of a car in crowdy environment. One PhD thesis (Maria Kabtoul, working on Proactive and Social Navigation For Autonomous Vehicles In Shared Spaces) has been defended in december 2021.
- MOBIDEEP: (2017-2023) technology-aided MOBIlity by semantic Deep learning: INRIA (ACENTAURI), GREYC, INJA, SAFRAN (Group, Electronics & Defense). (P. Martinet, P. Rives). We are involved in Personal assistance for blind people, Proactive navigation of a robot in human populated environment, and Deep learning in depth estimation and semantic learning.
- ANNAPOLIS: (2022-2025) AutoNomous Navigation Among Personal mObiLity devIceS: INRIA (ACENTAURI, CHROMA), LS2N, HEUDIASYC. (E. Malis, P. Martinet, P. Rives). This project has been accepted in 2021. We will be involved in Augmented Perception using Road Side Unit PPMP detection and tracking, Attention map prediction, and Autonomous navigation in presence of PPMP.
- SAMURAI: (2022-2026) ShAreable Mapping using heterogeneoUs sensoRs for collAborative robotIcs: INRIA (ACENTAURI), LS2N, MIS. (E. Malis, P. Martinet, P. Rives). This project has been accepted in 2021. We will be be involved in building Shareable maps of a dynamic environment using heterogeneous sensors, Collaborative task of heterogeneous robots, and Update the shareable maps.
- TIRREX (2021-2029) is an EQUIPEX+ funded by ANR and coordinated by N. Marchand. It is composed of six thematic axis (XXL axis, Humanoid axis, Aerial axis, Autonomous Land axis, Medical axis, Micro-Nano axis) and three transverse axis (Prototyping & Design, Manipulation, and Open infrastructure). The kick-off has been done in december 2021. Acentauri is involved in:
- Autonomous Land axis (ROB@t) is coordinated by P. Bonnifait and R. Lenain is covering Autonomous Vehicles and Agricultural robots (E. Malis, P. Martinet, P. Rives).
- Aerial Axis is coordinated by I. Fantoni and F. Ruffier (E. Malis, P. Martinet).
- PEPR: agroecology and digital (E. Malis, P. Martinet, P. Rives). In the framework on this PEPR, ACENTAURI is leading the coordination (R. Lenain (INRAE), P. Martinet (INRIA), Yann Perrot (CEA)) of a proposal called NINSAR (New ItiNerarieS for Agroecology using cooperative Robots) accepted in 2022. It gathers 17 research teams from INRIA (3), INRAE(4), CNRS(7), CEA, UniLasalle, UEVE.
Defi
- Inria-Cerema ROAD-AI (2021-2024) (E. Malis, P. Martinet, P. Rives). The aim of this defi is to invent the asset maintenance of infrastructures that could be operated in the coming years. This is to offer a significant qualitative leap compared to traditional methods. Data collection is at the heart of the integrated management of road infrastructure and engineering structures and could be simplified by deploying fleets of autonomous robots. Indeed, robots are becoming an essential tool in a wide range of applications. Among these applications, data acquisition has attracted increasing interest due to the emergence of a new category of robotic vehicles capable of performing demanding tasks in harsh environments without human supervision.
Tight collaboration
Due to the secondment of Philippe Martinet, we have a strong collaboration with ARMEN team concerning Multi-robot control, Autonomous navigation, Deep learning, and Visual servoing. Some topics appear outside the scope of the ACENTAURI Team, but they have already ended two years ago. Only the valorisation is remaining. They are mentionned below:
- In 2, we investigate the use of variable stiffness springs (VSS) in parallel configuration with the motors. These springs store the energy during the braking phase, instead of dissipating it. The energy is then released to actuate the robot in a next displacement phase. This design approach is combined with a motion generator which seeks to optimize trajectories for input torques reduction (and thus of energy consumption), through solving a boundary value problem (BVP) based on the robot dynamics.
10.5 Regional initiatives
EPISUD
(2022-2023): The EPISUD project focuses on the effects of climate change on forests by using robotic means to measure the impact of this change as well as that of aggravating factors such as parasites, fungi or insects. Naturally, this project is linked to agriculture, which suffers the same effects and has similar centers of interest. The EPISUD project is a first stone in the building of a larger project where a complete and autonomous heterogeneous multi-robot system will be able to perform certain tasks autonomously in the long term. It makes it possible to bring together a first consortium (INRIA, DRAAF, PNR des Préalpes d'Azur, INRAE, ONF) which will have to expand with the various players in the sector. The project has been granted by the PACA region in 2022, a PHD grant has been obtained from DS4H at UCA to support the initiative, an engineer position will start in 2023 (funded by Inria) to support technical developments and experimentations.
11 Dissemination
Participants: Ezio Malis, Philippe Martinet, Patrick Rives.
11.1 Promoting scientific activities
11.1.1 Scientific events: organisation
- PPNIV22 : Corresponding organizer (P. Martinet)
- PNARUDE22 : Co-organizer (P. Martinet)
- ICITT22 : Publicity chair (P. Martinet)
- ICARCV22: Co-organizer of an Invited session on Outdoor autonomous systems: theory, technology and applications (P. Martinet)
Member of the organizing committees
- PSIVT22 : Regional Chair (P. Martinet)
- ITSC22 : Associate Editor (P. Martinet)
- IROS22 : Associate Editor (P. Martinet)
11.1.2 Scientific events: selection
Member of the conference program committees
- ROBOVIS22 : Program Committee Member (E. Malis)
- ROBOVIS22 : Program Committee Member (P. Martinet)
- ICAS22 : Program Committee Member (P. Martinet)
- CISRAM22 : Program Committee Member (P. Martinet)
- PPNIV22 : Program Committee Member (P. Martinet)
- PPNIV22 : Program Committee Member (E. Malis)
- PNARUDE22 : Program Committee Member (P. Martinet)
Reviewer
- ICRA22 : 4 papers (P. Martinet)
11.1.3 Journal
Member of the editorial boards
- RA-L : Associated Editor in the area “Vision and Sensor-Based Control” (E. Malis), 12 papers.
11.1.4 Invited talks
- E. Malis has given a talk on Quantum Algorithms for Robotics at the Quantazur workshop in June 2022.
- Philippe Martinet has given an Invited Keynote on Proactive Autonomous Navigation in Human Populated Environment, in International Conference on Ubiquitous Information Management and Communication, Seoul, South Korea, January 2022.
- Philippe Martinet has given an Invited Keynote on Proactive Autonomous Navigation in Human Populated Environment, in 11th IFAC Symposium on Intelligent Autonomous Vehicle, Prague, Czech Republic, July 2022.
- Philippe Martinet has given an invited talk on Proactive Autonomous Navigation in Human Populated Environment, Sciences and Art Croatian Academia, Zagreb, Croatia, November, 2022.
11.1.5 Leadership within the scientific community
- Corresponding Cochair of the RAS-TC on AGV & ITS (P.Martinet)
11.1.6 Scientific expertise
- ANR CES22 Expert (P.Martinet)
- ANR CES33 Expert (E. Malis)
- Call HORIZON-CL4-DIGITAL-EMERGING-2021-01-12 - European Network of Excellence Centres in Robotics Expert (1 proposal) (P. Martinet)
- BACCHUS European project reviewer (P. Martinet)
- ROBUTCHER European project reviewer (P. Martinet)
- Ile-de-France region project expert (1 proposal) (P. Martinet)
- FNRS (Belgium) Expert (1 proposal) (P. Martinet)
- Call for grants to support the scientific activity of research groups in Catalonia, Expert (9 research groups) (P. Martinet)
11.1.7 Research administration
- Coordinator of the PEPR project Ninsar (P. Martinet)
- Coordinator of the ANR project MOBI-DEEP (P. Martinet)
- Coordinator of the ANR project ANNAPOLIS (P. Martinet)
- Coordinator of the ANR project SAMURAI (E. Malis)
- Coordinator of the Regional project EPISUD (P. Martinet)
Internal or external Inria responsibilities
- Member of DS4H COSP (P.Martinet)
- E. Malis is a member of BECP (Bureau des comité de projets) at Centre Inria d'Université Côte d'Azur
- E. Malis is the scientific leader of the Inria - Naval Group partnerships
11.2 Teaching - Supervision - Juries
The team has received 3 master 2 students, 1 master 1 student and 1 intern.
11.2.1 Supervision
- Ziming Liu (in progress): Representation of the environment in autonomous driving applications, (1/12/2020-...) Phd supervisors: P.Martinet and E. Malis
- Diego Navarro (in progress): Precise localisation and control of an autonomous multi robot system for long-term infrastructure inspection, Defi Inria-Cerema ROAD-AI, (1/12/2021-...) Phd supervisors: E. Malis and C. Fauchard, co-supervisors: N.Mitton, P.Martinet, R. Antoine (CEREMA)
- Matteo Azzini (started on 1/10/2022) "Lidar-vision fusion for robust robot localization and mapping", Phd supervisors: E. Malis and P. Martinet; co-supervisor: P. Rives.
- Enrico Fiasché (started on 1/10/2022) "Modeling and control of a heterogeneous and autonomous multi-robot system", Phd supervisors: P. Martinet and E. Malis; co-supervisor: P. Rives.
- Stefan Larsen (started on 1/10/2022) "Detection of changes and update of environment representation using sensor data acquired by multiple collaborative robots", Phd supervisors: E. Malis and El Mustapha Mouaddib (MIS Amiens), co-supervisors: P. Rives.
- Mathilde Theunissen (started on 1/11/2022) "Multi-robot localization and navigation for infrastructure monitoring", Phd supervisor Isabelle Fantoni, co-supervisors: E. Malis and, P. Martinet.
- Fabien Lionti (started on 1/10/2022) "Dynamic behavior evaluation by artificial intelligence: Application to the analysis of the safety of the dynamic behavior of a vehicle", Phd supervisors: P. Martinet; co-supervisors: N. Gutoswski (LERIA, Angers), S. Aubin (DGA-TT, Angers).
- Emmanuel Alao (started on 1/10/2022) "Probabilistic risk assessment and management architecture for safe autonomous navigation ", Phd supervisors: L. Adouane (Heudiasyc, Compiègne) and P. Martinet.
11.2.2 Juries
- Patrick Rives has been president of the Best Thesis Award of the French National Robotic Network - GdR Robotique
- Philippe Martinet has been member of the Best Thesis Award of the French National Robotic Network - GdR Robotique
- E. Malis has been member of the Best Thesis Award of the French National Robotic Network - GdR Robotique
- E. Malis has been president of the jury of the PhD thesis of Ninad Manerikar (I3S, Sophia Antipolis)
- E. Malis has been member of the jury of the HDR of Andrew Comport (I3S, Sophia Antipolis)
- Philippe Martinet has been reviewer and member of the jury of the PhD of Daravuth Koung (LS2N, Nantes)
- Philippe Martinet has been international reviewer of the Master Thesis of Dai Yunxiang (NTU, Singapore)
11.3 Popularization
11.3.1 Interventions
- Interview from local journalist based on Autonomous vehicles and taxis, Ndjelia Vecernji List, Zagreb, Croatia, November 2022 (P.Martinet)
- Interview on Autononous vehicles from she scientific section of the Croatian Radio-television, Zagreb, Croatia, November 2022 (P.Martinet)
12 Scientific production
12.1 Major publications
- 1 articleReal-time Quadrifocal Visual Odometry.The International Journal of Robotics Research2922010, 245-266
12.2 Publications of the year
International journals
International peer-reviewed conferences
12.3 Cited publications
- 9 articleMulti-Sensor-Based Predictive Control For Autonomous Parking.IEEE Transactions on Robotics2August 2022, 835-851