
Keywords
Computer Science and Digital Science
- A5.9.2. Estimation, modeling
- A6.4.1. Deterministic control
- A6.4.4. Stability and Stabilization
- A6.4.5. Control of distributed parameter systems
- A9.5. Robotics
Other Research Topics and Application Domains
- B1.1.8. Mathematical biology
- B2.1. Well being
- B5.6. Robotic systems
- B7.2.1. Smart vehicles
1 Team members, visitors, external collaborators
Research Scientists
- Denis Efimov [Team leader, INRIA, Senior Researcher, HDR]
- Jin Gyu Lee [INRIA, Researcher, from Dec 2022]
- Andrey Polyakov [INRIA, Researcher, HDR]
- Rosane Ushirobira [INRIA, Researcher, Deputy head, HDR]
Post-Doctoral Fellow
- Jesus Mendoza Avila [INRIA]
PhD Students
- Mericel Ayamou [UNIV LILLE, from Nov 2022]
- Mahugnon Dadjo [INRAE/INRIA, from Aug 2022]
- Anatolii Khalin [INRIA]
- Min Li [CSC Scholarship]
- Wenjie Mei [CSC Scholarship, until Sep 2022]
- Artem Nekhoroshikh [Centrale Lille-ITMO/Russia, until Oct 2022]
- Danilo Rodrigues De Lima [INRIA/Region, from Dec 2022]
- Yu Zhou [CSC Scholarship]
Interns and Apprentices
- Nathan Capon [INP Grenoble, until Sep 2022]
- Cas Henst [TU Eindhoven, until Nov 2022]
Administrative Assistants
- Lucille Leclercq [INRIA, until Aug 2022]
- Amélie Supervielle [INRIA]
Visiting Scientists
- Emilia Fridman [Tel Aviv University, until Jul 2022]
- Xinxin Han [CSC, HIT, until Oct 2022]
External Collaborators
- Gerald Dherbomez [CNRS]
- Leonid Fridman [UNAM, from Dec 2022]
2 Overall objectives
The Valse team studies the estimation and control problems arising in the analysis and the design of distributed, uncertain, and interconnected dynamical systems:
- Using the concepts of finite-time/fixed-time/hyperexponential convergence and stability, the main idea is to separate and hierarchize in time the control and estimation processes, which are distributed in space. This greatly simplifies their analysis and the design for large-scale solutions.
- The main areas of investigation and application are the Internet of Things (IoT) and Cyber-Physical Systems (CPS).
- The team aims to draw up algorithms for decentralized finite-time control and estimation. The methodology to be developed includes extensions of the theory of homogeneous systems and of finite-time/fixed-time/hyperexponential convergence and stability notions. Particular attention is given to applications in real-world scenarios.
- It is a joint proposal with the CNRS CRIStAL UMR 9189.
3 Research program
The Valse team works in the domains of control science: dynamical systems, stability analysis, estimation, and automatic control. Our developments are focused on the theoretical and applied aspects related to the control and estimation of large-scale multi-sensor and multi-actuator systems based on the use of the theories of finite-time/fixed-time/hyperexponential convergence and homogeneous systems. The Lyapunov function method and other methods of analysis of dynamical systems form a basis for the studies in the Valse team.
The key idea of the research program for the team is that a fast (non-asymptotic) convergence of the regulation and estimation errors increases the reliability of intelligent distributed actuators and sensors in complex scenarios, such as interconnected cyber-physical systems (CPSs).
The expertise of Valse's members in theoretical developments of control and estimation theory (finite-time control and estimation algorithms in centralized context 61, 47, 58, 57, 54, homogeneity framework for differential equations 62, 49, 48, 50, 52, 63, 59, time-delay systems 51, 53, 66, distributed systems 60 and algebraic-based methods for estimation 64, 65) is an essential ingredient to achieve our objective.
The generic chart of different goals and tasks included in the scientific work program of Valse and interrelations between them are presented in Fig. 1. We have selected three main objectives to pursue with the related tasks to fulfill:
- The first objective is to design control and estimation solutions for CPS and IoT, which is the principal aim of Valse. It will contain the main outcomes of our research.
- The second objective is more theoretical and needed to make the basement for our design and analysis parts in the last goal.
- The third objective deals with applications, which will drive the team and motivate the theoretical studies and selected design performances.
All these objectives are interconnected: from a particular problem in an IoT application, it is planned to design control or estimation algorithms, leading to the development of theoretical tools; and vice versa, a new theoretical advance can provide a possibility for the development of novel tools which can be used in applications.
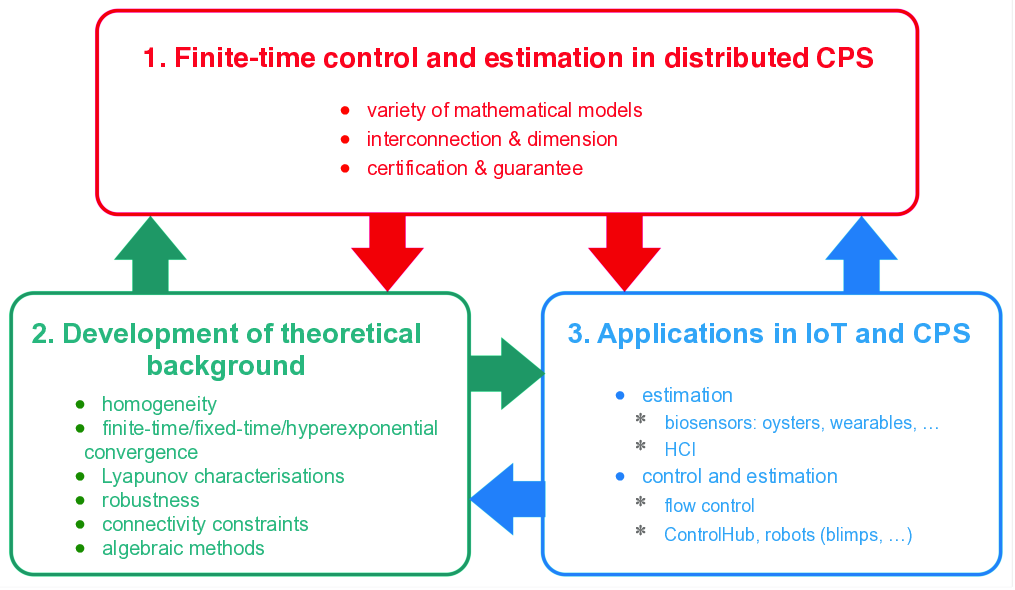
Graphical presentation of objectives given in the text
Structure of the objectives and tasks treated in Valse
To explain our motivation: why use finite time? Applying any method for control/estimation has a price in terms of its advantages and disadvantages. There is no universal framework that is the best always and everywhere. Finite-time may appear as a luxurious property for a physical system, requiring nonlinear tools. Of course, if an asymptotic convergence and a linear model are enough for solving a given problem, then there is no reason to develop something else. However, most of the present problems in CPS and IoT are nonlinear (i.e., they have various local behaviors that cannot be collected in only one linear model). Design and analysis of various local linearized models and solutions are luxurious, too. The theory of homogeneity can go beyond linearity, offering many new features while not appearing as severe as other nonlinear tools and having almost all hints of the linear framework. Suppose that, thanks to the homogeneity theory, finite-time/fixed-time can be obtained with little difficulty while adding the bonuses of stronger robustness and faster convergence compared to the linear case? We are convinced that the price of going beyond linear control and estimation can be strongly dropped by maturing the theory of homogeneity and finite/fixed-time convergence. We are also convinced that it will be compensated in terms of robustness and speed, which can be demanded in the new areas of application such as IoT for example.
4 Application domains
An objective of the team is the application of the developed control and estimation algorithms for different scenarios in IoT or CPSs. Participation in various potential applications allows the Valse team to better understand the features of CPSs and their required performances, and to properly formulate the control and estimation problems that must be solved. Here is a list of ongoing and potential applications addressed by the team:
- smart bivalve-based biosensor for water quality monitoring (ANR project
WaQMoS, the developed
sensor is shown in Fig. 2): in living beings,
the presence of persistent external perturbations may be difficult
to measure, and important model uncertainties render the application
of conventional techniques complicated; another issue for estimation
is the consensus-seeking between animals for contamination detection 45;
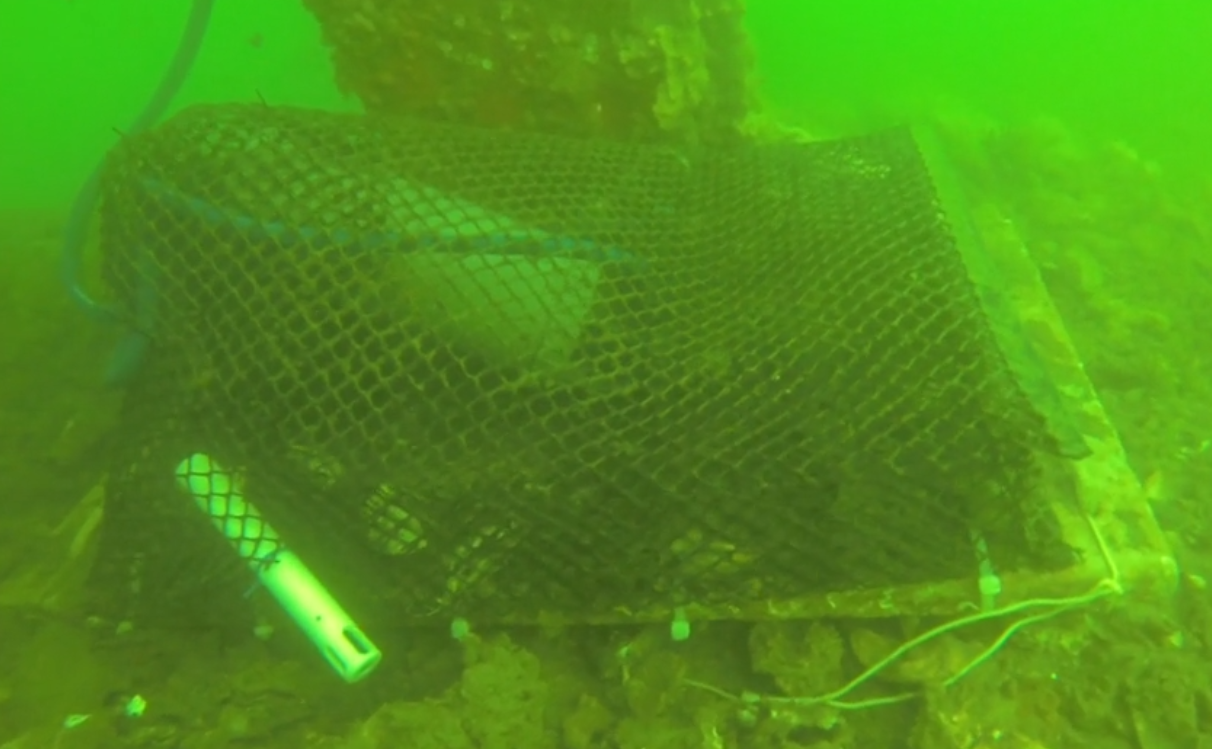
Underwater photo of bivalves connected to computer
Figure 2: The valvometer used in the ANR project WaQMoS
- control and estimation for flying vehicles, e.g. quadrotors
or blimps given in Fig. 3: the nonlinearity of the model and its
uncertainty coupled with important aerodynamic perturbations have
to be compensated by fast (finite- or fixed-time) and robust control
and estimation algorithms;

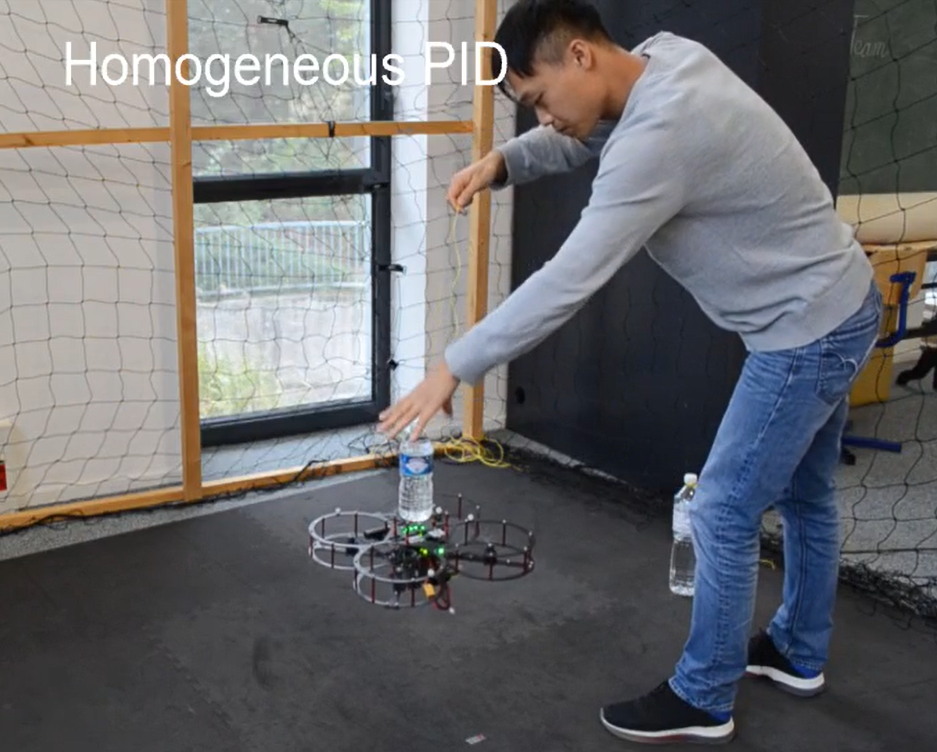
1) Photo of blimp robot, big ball with helium with a small computer at the bottom. 2) S. Wang placing a bottle of water on the flying drone Blimp and quadrotor robots: 1) Photo of blimp robot, big ball with helium with a small computer at the bottom. 2) S. Wang placing a bottle of water on the flying drone
Blimp and quadrotor robots: 1) Photo of blimp robot, big ball with helium with a small computer at the bottom. 2) S. Wang placing a bottle of water on the flying drone
Figure 3: Blimp and quadrotor robots
- human behavior modeling and identification with the posterior design of algorithms for human-computer interaction (HCI, with the Inria team LOKI): robust finite-time differentiators demonstrate good estimation capabilities needed for prediction in this application 65, 46;
- human physiological characteristics estimation (like emotion detection, galvanic skin response filtering, fatigue evaluation in collaborations with Neotrope and Ellcie Healthy): intelligent robust filtering and finite-time distributed estimation are key features in these scenarios;
- path planning for autonomous vehicles taking into account the behavior of humans (with the Inria team SCOOL): application of interval and finite-time adaptive estimation and prediction techniques allows for treating the uncertainty of the environment by reducing the computational complexity of reinforcement learning 561;
- flow control (in the framework of ContrATech subprogram of CPER ELSAT,
see also 55): the case of control and
estimation of a distributed-parameter system with very fast and uncertain
dynamics, where finite-time solutions developed by Valse are necessary (an example of results is given in Fig. 4);
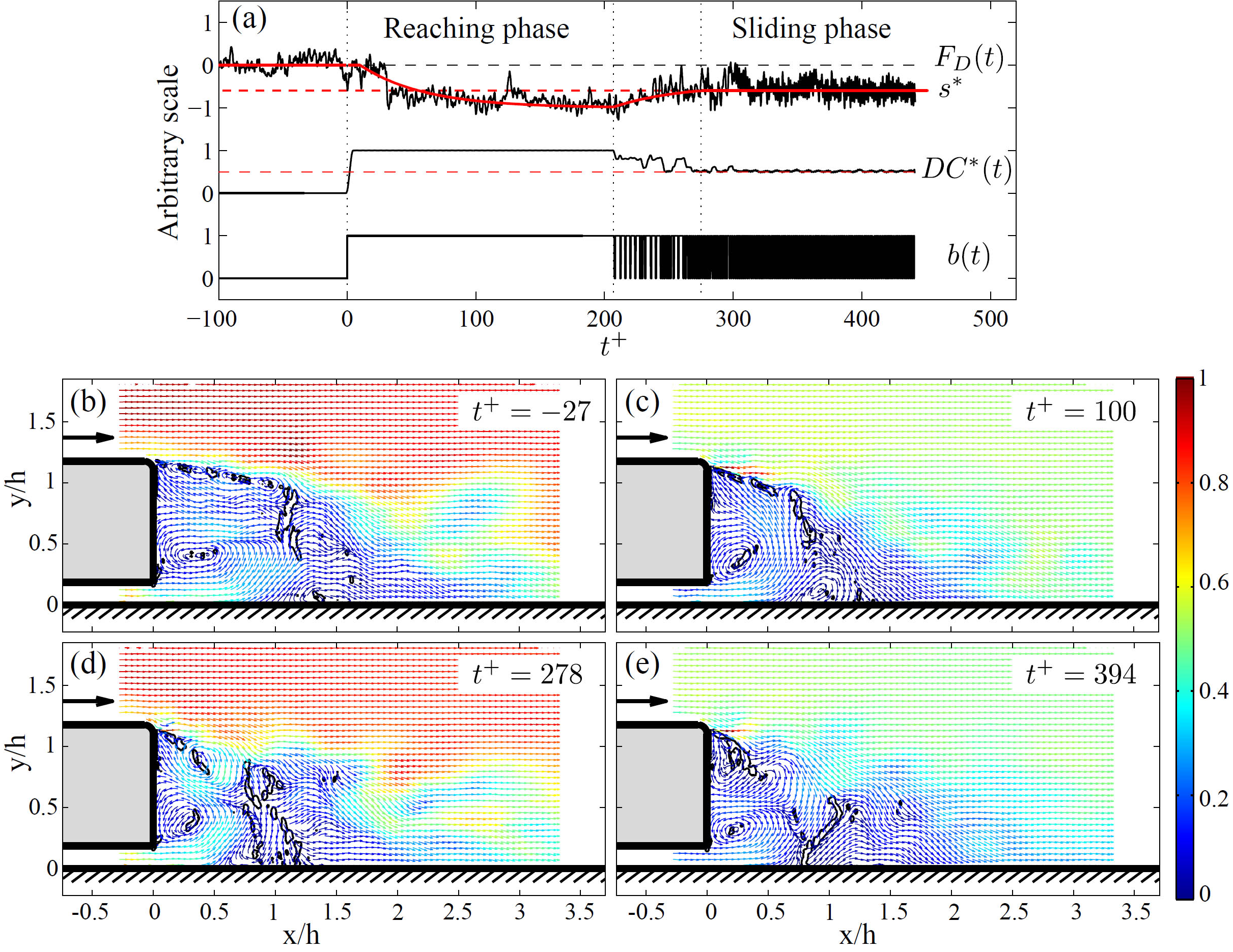
Different graphics demonstrating flow behavior and the control input
Figure 4: Particle Image Velocimetry on flow control for an Ahmed body (LAMIH wind tunnel)
- control of synthetic microbial communities (in the framework of IPL COSY): here again, the problem is an important uncertainty of the model, which can be handled by robust sliding mode control algorithms, or by applying adaptive finite-time estimation and identification tools;
It is worth highlighting a widespread distribution of various scientific domains in the list of applications for the team given above. Such interdisciplinarity for Valse is unsurprising since control theory is a science of systems whose interest today is, by nature, to interface with other disciplines and their fields of application. This is also well aligned with the domain of CPSs, which by its origin requires multidisciplinary competencies.
5 Highlights of the year
- Recruitment of a new researcher, Jin Gyu Lee
- Visits of M. Mera (IPN, Mexico), H. Rios (Tecnológico Nacional de México, Mexico), E. Fridman (Tel Aviv University, Israel), M. Ruderman (University of Agder, Norway), Y. Orlov (CICESE Research Center, Mexico), L. Fridman (UNAM, Mexico)
- Two patents have been submitted, one with the FUN team on synchronization for Visible Light Communication (VLC)(following 37, 28), and another with 52 Hertz startup on speech filtering in underwater communication for divers
- A. Polyakov made a plenary talk at the 16th International Workshop on Variable Structure Systems and Sliding Mode Control (VSS 2022), Rio de Janeiro, Brazil
6 New software and platforms
6.1 New software
6.1.1 ControlHub
-
Keywords:
Automatic control, Web laboratory
-
Scientific Description:
ControlHub is a software platform that leverages collaborative research and experimentations in the field of automatic control.
The driving idea is to interconnect a group of actors (researchers, engineers, etc.) around a control problem and grant them remote access to existing experimental facilities, thus allowing them to verify their theoretical results online, and finally share them with the project members.
The platform architecture relies on three key principles: - Problem centric: The control problem to be solved is the core project, whereas the software resources, tools and online experiments are web services available to support experimental verification of the solutions. - Separation of concerns: setup and maintenance of experiment facilities, installation of software tools, problem formulation and theoretical analysis, etc. - Resource sharing: software packages, experimental facilities, open problems.
The main expected features of the platform are the following: - Model-based simulation: with tools like Matlab/Simulink as reference, but open to others such as Scilab, ControlLab, etc. - Rapid controller prototyping: automatic native code generation from simulation code, on-target validation, online parameters tuning - Open architecture: APIs and abstraction layers to allow integration of new experimental facilities
-
Functional Description:
The driving idea is to interconnect a group of actors (researchers, engineers, etc.) around a control problem and grant them remote access to existing experimental facilities, thus allowing them to verify their theoretical results online, and finally share them with the project members.
The platform architecture relies on three key principles: - Problem centric: The control problem to be solved is the core project, whereas the software resources, tools and online experiments are web services available to support experimental verification of the solutions. - Separation of concerns: setup and maintenance of experiment facilities, installation of software tools, problem formulation and theoretical analysis, etc. - Resource sharing: software packages, experimental facilities, open problems.
- URL:
-
Contact:
Andrey Polyakov
-
Participant:
Andrey Polyakov
6.1.2 HCS Toolbox
-
Name:
Homogeneous Systems Control Toolbox (HSC Toolbox) for MATLAB
-
Keywords:
Control design, Matlab, Homogeneity
-
Functional Description:
Homogeneous Systems Control Toolbox (HCS Toolbox) for MATLAB is a collection of functions for design and tuning of control systems with improved control quality (faster convergences, better robustness, smaller overshoots, etc) based on the concept of a dilation symmetry (homogeneity). Homogeneous controllers/observers design well as procedures for upgrading of existing linear controllers/observers to nonlinear (homogeneous) ones are developed for both Single-Input Single-Output (SISO) and Multiply-Input Multiply-Output (MIMO) systems.
-
Release Contributions:
HCS Toolbox for MATLAB ver. 0.1
This is the first release of HCS Toolbox for MATLAB. The list of MATLAB functions provided for homogeneous control systems design: (Homogeneous Objects) hnorm - computation of homogeneous norm hproj - computation of homogeneous projection hcurve - generation of points of a homogeneous curve hsphere - generation of a random grid on a homogeneous sphere (Homogeneous Control Design) hpc_design - Homogeneous Proportional Control (HPC) design hpci_design - Homogeneous Proportional-Integral Control (HPIC) design hsmc_design - Homogeneous Sliding Mode Controller (HSMC) design hsmci_design - design of HSMC with Integral action fhpc_design - Fixed-time HPC design fhpic_design - Fixed-time HPIC design lpc2hpc - upgrading Linear Proportional Control (LPC) to HPC lpic2hpc - upgrading Linear PI control (LPIC) to HPIC (Discretization of Homogeneous Control) e_hpc - explicit discretization of HPC e_hpc - semi-implicit discretization of HPC c_hpc - consistent discretization of HPC e_hpic - explicit discretization of HPIC e_hsmc - explicit discretization of HSMC si_hsmc - semi-implicit explicit discretization of HSMC e_hsmci - explicit discretization of HSMC with Integral action e_fhpc - explicit discretization of Fixed-time HPC si_fhpc - semi-implicit discretization of Fixed-time HPC e_fhpic - explicit discretization of Fixed-time HPIC (Homogeneous Observer Design) ho_design - Homogeneous Observer (HO) design fho_design - Fixed-time HO design lo2ho - upgrading Linear Observer (LO) to HO (Discretization of Homogeneous Observer) e_ho - explicit Euler discretization of HO e_fho - explicit Euler discretization of FHO si_ho - semi-implicit discretization of HO si_fho - semi-implicit discretization of FHO (Block forms ) block_con - transformation to block controlability form bloc_obs - transformation to block bservability form trans_con - transformation to partial block controlability form trans_con - transformation to partial block observability form output_form - transformation to reduced order output control system (Examples) demo_hnorm - demo of computation of a homogeneous norm demo_hsphere - plot of homogeneous balls in 2D demo_hpc - demo of HPC design and simulation demo_hpic - demo of HPIC design and simulation demo_hsmc - demo of HSMC design and simulation demo_hsmci - demo of HSMCI design and simulation demo_fhpc - demo of FHPC design and simulation demo_fhpic - demo of FHPIC design and simulation demo_lpc2hpc - demo of upgrading LPC to HPC/FHPC demo_lpic2hpic - demo of upgrading LPIC to HPIC/FHPIC demo_ho - demo of HO design and simulation demo_fho - demo of FHO design and simulation demo_lo2ho - demo of upgrading LO to HO/FHO For more details please read the documentation: HCS_doc.pdf
- URL:
-
Contact:
Andrey Polyakov
7 New results
7.1 Analysis and design of homogeneous and finite-time stable systems
Participants: Denis Efimov, Andrey Polyakov.
In 12, the problem of finite-time and fixed-time stability analysis is considered for a class of nonlinear systems , where is homogeneous of a nonnegative degree and is bounded. It is shown that under certain conditions on the asymptotic stability of the system implies its finite-time stability or nearly fixed-time stability. The so-called homogeneous extensions are utilized for the analysis. An example of a mechanical system is presented to illustrate the obtained results.
The paper 20 provides a sufficient condition to ensure output finite-time and fixed-time stability. Comparing with analogous researches, the proposed result is less restrictive and obtained for a wider class of systems. The presented output stability condition is used for adaptive control design, where the state vector of a plant is extended by adjustable control parameters.
The paper 21 is devoted to the problem of finite-time and fixed-time observation of linear multiple input multiple output control systems. The proposed dynamic observers do not require system transformation to a canonical form and guarantee convergence of the observation error to zero in a finite or in a fixed time. It is shown that the observers are robust (in input-to-state sense) against input disturbances and measurement noises. The results are supported with simulation examples.
7.2 Analysis and design for time-delay systems
Participants: Denis Efimov, Andrey Polyakov.
Razumikhin-like theorems on hyperexponential and fixed-time stability of time-delay systems are proposed for both explicitly and implicitly defined Lyapunov functions in 4. While the former method is useful for stability analysis, the latter approach is more suitable for control synthesis. Examples of systems that can be stabilized hyperexponentially and in fixed time are given. The control parameters tuning algorithm is presented in the form of linear matrix inequalities.
The concept of practical fixed-time input-to-state stability for neutral time-delay systems with exogenous perturbations is introduced in 16. Lyapunov-Krasovskii theorems are formulated in explicit and implicit ways. Further, the problem of static nonlinear output-feedback stabilization of a linear system with parametric uncertainties, external bounded state and output disturbances by using artificial delays is considered. The constructive control design consists in solving linear matrix inequalities with only four tuning parameters to be chosen. It is shown both, theoretically and numerically, that the system governed by the proposed controller converges faster to the given invariant set than in the case of using its linear counterpart.
7.3 Consistent discretisation of homogeneous systems
Participants: Denis Efimov, Andrey Polyakov.
A discretization of a homogeneous controller for a double integrator is developed in 34, 35. It preserves the finite-time stability property even in the case of the sampled-time implementation of the control law. Theoretical results are supported by numerical simulations.
7.4 Homogenization of PID controls
Participants: Andrey Polyakov.
In the paper 5, the objective is to design a nonlinear controller under time and state constraint for quadrotor. The nonlinear quadrotor model is built by the Euler-Lagrange approach while ignoring the Coriolis terms, hub moment and force. The designed regulator is an implicit PID controller, where the feedback gains are obtained from LMIs (Linear matrix inequalities). LMI system characterizing the system stability and convergence properties is built based on convex embedding approach and implicit Lyapunov function method. To demonstrate the application prospects of implicit PID controller, robustness analysis is provided under external disturbance. The key novelty of this paper is that the implicit PID controller is proven feasible for applying to the quadrotor under time and state constraints, which is also the main outcome.
The article 17 proposes a procedure for upgrading a linear proportional controller to a sliding mode one preventing a degradation of a control quality. Two nonlinear algorithms are studied in this context: Unit and Homogeneous Sliding Mode Controllers (SMCs). The parameters of the nonlinear controllers are defined using the gains of the (already well-tuned) linear controller. The main idea of this upgrading procedure is to split the state-space into two regions, the region of the linear control and the region of the nonlinear control. This is done via a suitable design parameter. The theoretical developments are validated experimentally on a rotary inverted pendulum. Comparisons between the already well-tuned linear controller and the proposed upgraded nonlinear controllers are presented. The experiments in a rotary inverted pendulum demonstrate that the upgraded controller significantly improves the control precision without degradation of the control signal.
7.5 Accelerated adaptive parameter estimation
Participants: Denis Efimov, Rosane Ushirobira.
In 2, it is demonstrated that the dynamic regressor extension and mixing (DREM) method provides a fixed-time converging parameter estimation for persistently excited regressor under bounded measurement noises. Application of DREM method using delays as extension filters to harmonic signals estimation in power grids is considered in 7, 6. Integrating renewable energy sources into an unbalanced distribution network requires fast and accurate extraction of fundamental frequency of positive- and negative-sequence components from the unbalanced three-phase grid voltage signals, and the proposed fixed-time estimators respond these requirements.In 11, the problem of adaptive state observation for linear time-varying systems with delayed measurements and unknown parameters is studied. It is shown that the generalized parameter estimation-based observer provides a very simple solution, which being combined with the DREM estimation procedure, guarantees the parameter convergence in fixed-time imposing extremely weak excitation assumptions.
7.6 Control and estimation for Persidskii systems
Participants: Denis Efimov, Rosane Ushirobira.
Generalized Persidskii systems represent the dynamics described by the superposition of a linear part with multiple sector nonlinearities and exogenous perturbations. They can be used to model many physical and engineering phenomena.A state observer is designed in 14 for a class of generalized Persidskii systems with nonlinear measurements, state disturbances, and output noise. We assume that all nonlinearities are diagonal and belong to a sector. The robust stability and convergence conditions for the estimation error are obtained by applying the theory of input-to-output stability. These conditions are established in the form of linear matrix inequalities.
In paper 13, input-to-state stability and stabilization conditions in time-delay generalized Persidskii systems are studied. These conditions are formulated in terms of linear matrix inequalities, which may depend on delay values, and be local or global in state space. Numerical examples of opinion dynamics and the Lotka-Volterra model illustrate the efficiency of the proposed results.
7.7 Control of mechanical systems
Participants: Denis Efimov.
Mechanical systems under strongly nonlinear potential and dissipative forces, with nonlinear nonstationary perturbations having zero mean values, is studied in 8. Proposing a special construction of Lyapunov function, the conditions are found, under which the perturbations do not influence the asymptotic stability of the trivial equilibrium position of the system. These conditions include the requirements on asymptotic stability of the disturbance-free system and the relations of the nonlinearity orders between potential and dissipative forces. The developed theoretical approach is extended to the problem of monoaxial stabilization of a rigid body.
For two canonical models of mechanical systems with disturbances presented by Rayleigh-and Liénard-type equations, several designs of Lyapunov functions are investigated in 9. Under given restrictions, the existence of these functions implies global or local input-to-state stability property for the systems. Extending these results, the conditions of finite-time and fixed-time (integral) input-to-state stability are derived in 1. The efficiency of the proposed designs of Lyapunov functions is demonstrated in several applications.
The problem of delay-independent stability is investigated in 10 for a class of mechanical systems under dissipative, non-conservative and potential forces, which are described by homogeneous terms. The obtained conditions are extended to the case of switched force model under arbitrary and restricted commutation laws. The proof is based on analysis of a complete Lyapunov-Krasovskii functional (common and multiple ones are considered for switched scenario).
7.8 Estimation under communication constraints
Participants: Denis Efimov.
In the paper 19, an event-triggered observation scheme is considered for a perturbed nonlinear dynamical system connected to a remote location via a communication channel, which can only transmit a limited amount of data per unit of time. The dynamical system, which is supposed to be globally Lipschitz, is subject to bounded state perturbations. Moreover, at the system’s location, the output is measured with some bounded errors. The objective is to calculate estimates of the state at the remote location in real-time with maximum given error, whilst using the communication channel as little as possible. An event-triggered communication strategy is proposed in order to reduce the average number of communications. An important feature of this strategy is to provide an estimation of the relation between the observation error and the communication rate. The observation scheme’s efficiency is demonstrated through simulations of unicycle-type robots.
7.9 Model for pointing tasks with computer mouse
Participants: Denis Efimov, Rosane Ushirobira.
The paper 3 proposes a new simplified pointing model as a feedback-based dynamical system, including both human and computer sides of the process. It takes into account the commutation between the correction and ballistic phases in pointing tasks. We use the mouse position increment signal from noisy experimental data to achieve our main objectives: to estimate the model parameters online and predict the task endpoint. Some estimation tools and validation results, applying linear regression techniques on the experimental data are presented. We also compare with a similar prediction algorithm to show the potential of our algorithm's implementation. This work is done in collaboration with the LOKI team of Inria.
7.10 Synchronization for VLC
Participants: Denis Efimov, Rosane Ushirobira.
In the papers 37, 28, Visible Light Communication (VLC) paradigm has been expedited by the fast evolving and deployment of light emitting diodes (LED), and the possibility to simultaneously exploit the communication and illumination, enabling seamless connectivity based on the lighting infrastructure. Synchronization is a big deal in all the wireless communication systems and the key features of VLC paradigm make the synchronization techniques existing for radio frequencies not suitable for VLC. A novel technique, OSCI-LIGHT based on Andronov-Hopf oscillators, is proposed in this work in order to realize an effective synchronization mechanism in a VLC system. In particular, phase alignment and robustness towards noise have been tested through both numerical simulation and experimental results and a comparison with widely employed synchronization techniques, based on Phase Locked Loop (PLL), has been provided. Experimental results show that our technique outperforms PLL techniques in terms of noise robustness, showing a proper steady state phase delay and a lower Synchronization Error Rate, even in presence of highly noisy environmental conditions.
8 Bilateral contracts and grants with industry
8.1 Bilateral contracts with industry
Participants: Denis Efimov, Rosane Ushirobira.
- 52 Hertz is a startup (Brest, France) that develops an underwater communication device for divers. The goal of this contract was to develop an intelligent filtering algorithm that compensates for the voice deformation during underwater vocal communication through the device. The code for the filter was written in Matlab, with further help for its adaptation in Python and C. In 2022, with the support of AMIES (Agence Maths Enterprises) Nathan Capon was recruited for four months to improve the filtering and its implementation.
9 Partnerships and cooperations
9.1 International initiatives
9.1.1 Inria associate team not involved in an IIL or an international program
Inria Northern European Associate Team: WeCare
Participants: Denis Efimov, Rosane Ushirobira.
-
Title:
Efficient Estimation and Control Algorithms in Wearable Devices for Health and Care
-
Partner Institution(s):
- Uppsala University, Sweden
-
Date/Duration:
2020–2022
-
Additionnal info/keywords:
The goal of the team is to combine methods from Control Theory and Differential Algebra to design effective algorithms for control, detection and estimation in human wearable devices, or human medical and well-being applications.
9.1.2 STIC/MATH/CLIMAT AmSud projects
ECOS-Nord: Artificial Intelligence-based Control Approaches for Multiple Mobile Robots
Participants: Denis Efimov, Rosane Ushirobira, Andrey Polyakov.
-
Title:
Artificial Intelligence-based Control Approaches for Multiple Mobile Robots
-
Partner Institution(s):
- Tecnológico Nacional de México, Mexico
-
Date/Duration:
2021–2023
-
Additionnal info/keywords:
This team is focused on studying several tracking tasks for autonomous mobile robot systems, particularly unmanned aerial vehicles and wheeled mobile robots. This project aims to develop robust control and navigation schemes by combining the methods of artificial intelligence and control theory.
9.2 International research visitors
9.2.1 Visits of international scientists
Inria International Chair
Participants: Denis Efimov, Rosane Ushirobira, Andrey Polyakov.
Leonid Fridman, UNAM, Mexico, 12/2022
Other international visits to the team
Manuel Mera
-
Status
researcher
-
Institution of origin:
IPN
-
Country:
Mexico
-
Dates:
04/2022
-
Context of the visit:
ECOS-Nord
-
Mobility program/type of mobility:
research stay
Héctor Rios
-
Status
researcher
-
Institution of origin:
Tecnológico Nacional de México
-
Country:
Mexico
-
Dates:
05/2022
-
Context of the visit:
ECOS-Nord
-
Mobility program/type of mobility:
research stay
Emilia Fridman
-
Status
researcher
-
Institution of origin:
Tel Aviv University
-
Country:
Israel
-
Dates:
06/2022
-
Context of the visit:
Inria Invited Professor
-
Mobility program/type of mobility:
research stay
Michael Ruderman
-
Status
researcher
-
Institution of origin:
University of Agder
-
Country:
Norway
-
Dates:
06/2022
-
Mobility program/type of mobility:
research stay
Yury Orlov
-
Status
researcher
-
Institution of origin:
CICESE Research Center
-
Country:
Mexico
-
Dates:
12/2022
-
Mobility program/type of mobility:
research stay
9.3 National initiatives
9.3.1 ANR
- Digitslid (Digital set-valued and homogeneous sliding mode control and differentiators: the implicit approach), coordinator B. Brogliato (Inria, Grenoble)
- SyNPiD (Synchronization in power networks with periodic dynamics), coordinators D. Efimov (Inria, France) and J. Schiffer (Brandenburg University of Technology Cottbus-Senftenberg, Germany)
10 Dissemination
Participants: Denis Efimov, Rosane Ushirobira, Andrey Polyakov.
10.1 Promoting scientific activities
10.1.1 Scientific events: selection
Member of the conference program committees
- 2022, IFAC ALCOS, Casablanca, Morocco, D. Efimov, AE
10.1.2 Journal
Member of the editorial boards
- Asian Journal of Control, R. Ushirobira, AE
- Automatica, D. Efimov, AE
- IEEE TAC, D. Efimov, AE
- Nonlinear Nalysis: Hybrid Systems, D. Efimov, AE
Reviewer - reviewing activities
The members of the team permanently perform reviews for leading journals and conferences in the domain of the theory of control.
10.1.3 Invited talks
Seminars:
- D. Efimov, Friedrich-Alexander-Universität, Erlangen-Nürnberg, Germany
- D. Efimov, Dalian Maritime University, Dalian, China
- D. Efimov, Xidian University, Xi’an, China
- A. Polyakov, Xidian University, Xi’an, China
10.1.4 Leadership within the scientific community
- A. Polyakov, plenary talk, VSS 2022, Rio de Janeiro
10.1.5 Scientific expertise
- D. Efimov, Senior member IEEE
- D. Efimov, Member of IFAC TC 1.2. Adaptive and Learning Systems
- D. Efimov, Member of IFAC TC 9.2. Systems and Control for Societal Impact
- D. Efimov, Evaluation of project proposals: EU Commission, Tecnológico de Monterrey (Mexico)
10.1.6 Research administration
- R. Ushirobira is a member of the recruitment committee of CRCN/ISFP [Inria Lille and Inria Lyon] and MCF CNU 61 [Polytech Lille]
- R. Ushirobira is a member of the Commission d’évaluation (CE) at Inria
- R. Ushirobira is the president of the Inria Lille Research Jobs Committee
- R. Ushirobira is a member of the management team of CIMPA (International Center for Pure and Applied Mathematics) as Scientific Officer (Latin America)
- D. Efimov is an Executive committee member, IEEE CSS Technical Committee on Variable Structure and Sliding Mode Control
- D. Efimov is Publication vice-chair of IFAC TC 9.2. Systems and Control for Societal Impact
- D. Efimov is Co-chair of European PhD Award on Control for Complex and Heterogeneous Systems
10.2 Teaching - Supervision - Juries
10.2.1 Teaching
- Licence: R. Ushirobira, Basic courses in Linear algebra and Calculus, 71h, L3, Polytech Lille
- Master: D. Efimov, Dynamical systems, 17h, M2, Université de Lille
10.2.2 Juries
The members of the team participated in many PhD and HDR juries this year in France and abroad.
10.3 Popularization
10.3.1 Internal or external Inria responsibilities
- R. Ushirobira is the scientific vulgarisation officer: her mission is to be a scientific relay for actions and calls for scientific mediation projects and to raise awareness and federate potential actors of scientific vulgarisation by being an identified relay for the scientific staff of the center.
- R. Ushirobira is the organizer of the 30 MIN. de sciences, a rotating monthly seminar intended for all researchers of Inria Lille ( per year)
10.3.2 Articles and contents
An article on collaboration with 52 Hertz startup: When mathematical modelling helps divers communicate
10.3.3 Interventions
- R. Ushirobira made two interventions CHICHE at the Lycée Raymond Queneau (Villeneuve d’Ascq).
- R. Ushirobira organized a RJMI (Rendez-vous des Jeunes Mathématiciennes et Informaticiennes), at Inria Lille.
11 Scientific production
11.1 Major publications
- 1 articleDesign of Finite/Fixed-time ISS-Lyapunov Functions for Mechanical Systems.Mathematics of Control, Signals, and Systems2022
- 2 articleAccelerated convergence with improved robustness for discrete-time parameter estimation.Systems and Control Letters5512October 2022, 324-329
- 3 articleOn Computer Mouse Pointing Model Online Identification and Endpoint Prediction.IEEE Transactions on Human-Machine Systems525October 2022
- 4 articleHyperexponential and fixed-time stability of time-delay systems: Lyapunov-Razumikhin method.IEEE Transactions on Automatic Control2022
- 5 articleQuadrotor stabilization under time and space constraints using implicit PID controller.Journal of The Franklin InstituteJanuary 2022
11.2 Publications of the year
International journals
International peer-reviewed conferences
Conferences without proceedings
Scientific book chapters
Reports & preprints
11.3 Cited publications
- 45 articleVelocity estimation of valve movement in oysters for water quality surveillance.IFAC-PapersOnLine482015, 333--338
- 46 conferenceFrequency Domain Forecasting Approach for Latency Reduction in Direct Human-Computer Interaction.Proc. 56th IEEE Conference on Decision and Control (CDC)Melbourne2017
- 47 articleRobust finite-time output feedback stabilization of the double integrator.International Journal of Control8832015, 451--460
- 48 articleOn Homogeneity and Its Application in Sliding Mode.Int. J. Franklin Institute35142014, 1866--1901
- 49 articleVerification of ISS, iISS and IOSS properties applying weighted homogeneity.Systems & Control Letters622013, 1159--1167
- 50 articleOn conditions of oscillations and multi-homogeneity.Mathematics of Control, Signals, and Systems2812015, 1--37URL: http://dx.doi.org/10.1007/s00498-015-0157-y
- 51 articleDevelopment of Homogeneity Concept For Time-Delay Systems.SIAM Journal on Optimization and Control5232014, 1403--1808
- 52 articleRealization and Discretization of Asymptotically Stable Homogeneous Systems.IEEE Trans. Automatic Control62112017, 5962--5969
- 53 articleWeighted Homogeneity for Time-Delay Systems: Finite-Time and Independent of Delay Stability.IEEE Trans. Automatic Control6112016, 210--215
- 54 articleBoundary time-varying feedbacks for fixed-time stabilization of constant-parameter reaction-diffusion systems.Automatica1032019, 398--407URL: https://doi.org/10.1016/j.automatica.2019.02.013
- 55 articleSISO model-based control of separated flows: Sliding mode and optimal control approaches.International Journal of Robust and Nonlinear Control27182017, 5008-5027
- 56 conferenceInterval Prediction for Continuous-Time Systems with Parametric Uncertainties.Proc. 58th IEEE Conference on Decision and Control (CDC)Nice2019
- 57 articleFinite-time and Fixed-time Observer Design: Implicit Lyapunov function approach.Automatica8712018, 52-60
- 58 articleOn Homogeneous Finite-Time Control for Linear Evolution Equation in Hilbert Space.IEEE Transactions on Automatic Control2018
- 59 articleConsistent Discretization of Finite-time and Fixed-time Stable Systems.SIAM Journal on Optimization and Control5712019, 78--103
- 60 articleOn Homogeneous Distributed Parameter Systems.IEEE Trans. Automatic Control61112016, 3657--3662
- 61 articleFinite-time and fixed-time stabilization: Implicit Lyapunov function approach.Automatica512015, 332-340
- 62 articleNonlinear feedback design for fixed-time stabilization of linear control systems.IEEE Transactions on Automatic Control57(8)2012, 2106-2110
- 63 articleTime-Varying Parameter Identification Algorithms: Finite and Fixed-Time Convergence.IEEE Transactions on Automatic Control6272017, 3671--3678URL: https://dx.doi.org/10.1109/TAC.2017.2673413
- 64 conferenceEstimating the infection rate of a SIR epidemic model via differential elimination.Proceedings of ECCNaples2019
- 65 conferenceA forecasting algorithm for latency compensation in indirect human-computer interactions.Proceedings of ECCAlborg2016, 1081--1086
- 66 articleA note on delay robustness for homogeneous systems with negative degree.Automatica7952017, 178--184