Section: New Software and Platforms
Platforms
Platform : IMUSEF Modular embedded architecture for real time control of a FES system
Participants : Christine Azevedo Coste, Benoît Sijobert, Ronan Le Guillou, Martin Schmoll.
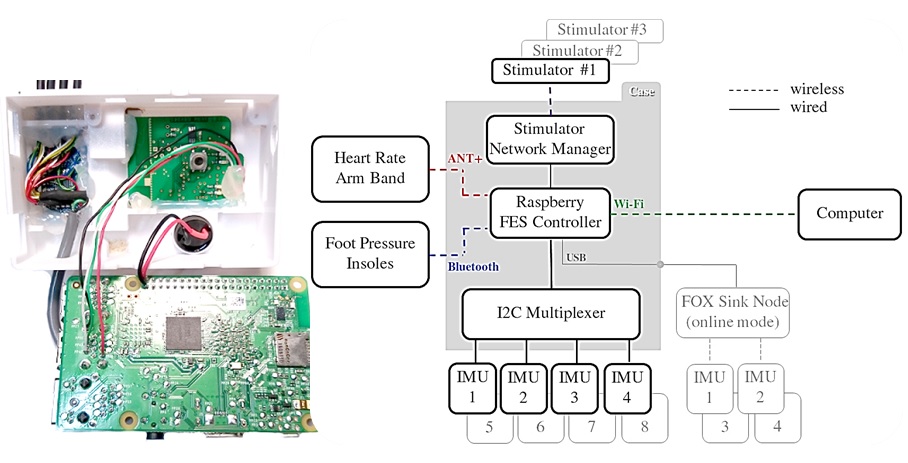
We have been working on the development of a new hardware and software architecture embedding a network of sensors and an electrical stimulator interfaced to a controller. The controller intends to be worn by the experiment participants.
A mini low-cost single board computer (Raspberry Pi3) was embedded in a 3D-printed case strapped around the waist of the subject. Using wireless inertial sensors connected as a WBAN, the sink node gets data from all the IMUs, therefore highly decreasing data flow when multiple IMUs are transmitting inside the network. To get rid of this limitation and guarantee an overall 100 Hz sampling rate no matter the number of IMUs, the wireless inertial sensors can be replaced by wired ones, low-cost with a high speed ARM Cortex-M0 based processor and a Kalman Filter directly providing quaternion estimation at 100 Hz for each IMU. The use of a multiplexer connected through an I2C interface (Inter Integrated Circuit) enabled to keep a 100 Hz rate using 4 IMUs.
The autonomous FES controller is able to acquire and process data, execute control algorithms and send the appropriate command to the stimulator. For safety reasons, in order to access to the FES controller and to enable a remote access to the stimulation from a computer, an ad-hoc Wi-Fi network is automatically provided by the Raspberry on start-up. The ad-hoc network enables to be independent from a network infrastructure where the connection is not always possible (e.g. Wi-Fi network from the hospital).
This scalable architecture (fig. 3), developed as a modular system, allowed us to implement new commands laws for Real Time closed loop control as well as giving us the possibility to use various types of sensors and stimulators to meet the needs of specific applications. To achieve this and in order for the FES architecture to directly control different electrical stimulators, Application Programming Interfaces (APIs) were developed for 3 main commercial stimulators in the team. They each corresponds to a specific need and use case. The Vivaltis Phoenix Stimulator allows for low-weight embedding, wireless network control, but only 2 stimulation channels are available at the moment, while being scalable, it is mainly used for experiments on gait. The BerkelBike Stimulator v2.0 presents a cumbersome but extended control compromise with 8 independent stimulation channels, which is an ideal solution for FES-assisted cycling. And finally the Hasomed Rehastim v1.0 allowing fine control but isn't battery powered in its commercial version, used mainly for upper limb experiments.
|
This new architecture is currently used in clinical experiments and will continue to evolve with a goal of being easy to use, even by untrained clinicians (i.e. FES assisted cycling §6.8).
The software APP of this platform can be found at https://bil.inria.fr/fr/software/view/3520/tab as the IMUSEF Project with the Bil Id: Software_3520.
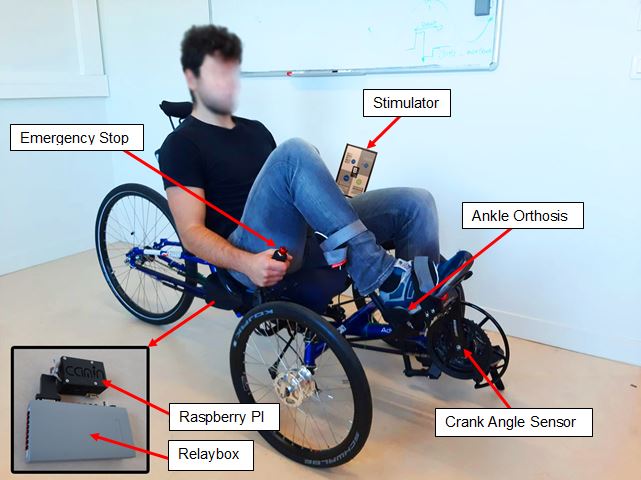
Platform : FESCYCLING FES-cycling platforms
Participants : Christine Azevedo Coste, Ronan Le Guillou, Martin Schmoll.
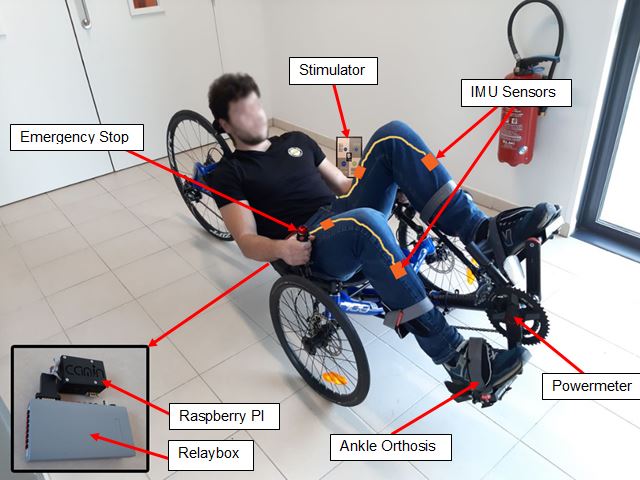
The embedded FES controller (IMUSEF) was reshaped for cycling application to improve modularity, performances and stability, using fully the capabilities of the Raspberry Pi 3B platform. These modifications now allow easier implementation, integration and usage of new control algorithms that could, in the future, be used for various end applications and contexts. Furthermore a Graphical User Interface (GUI) communicating with the embedded platform was developed, allowing on-the-fly modification of various parameters as well as safe control and monitoring of the running algorithms. An add-on relay box module allowing mechanical switching of the stimulating channels for more precise On/Off stimulation synchronization as well as more control and safety measures was also created. The two commercially available recumbent tricycles that we adapted for Spinal Cord Injured FES Cycling can be seen in Figure 4.
|
Platform : MEDITAPARK Wearable Tremor monitoring system based on acceleration monitoring
Participants : Christine Azevedo Coste, Ronan Le Guillou, Marion Holvoet.
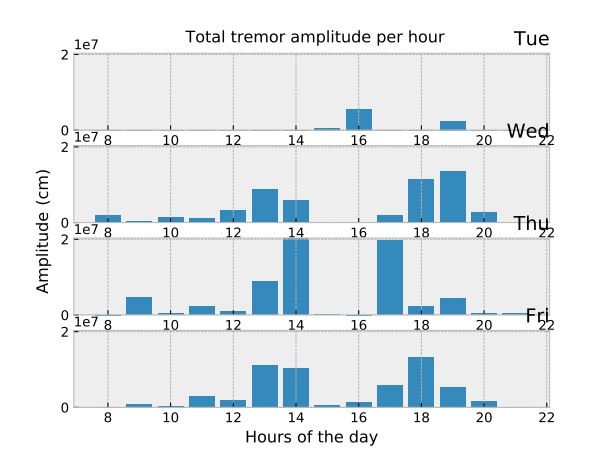
As part of a preliminary study on the effects of Mindfulness meditation on participants with Parkinson's Disease (PD) (§3), an application was developed to monitor at home tremor occurrence using a smartwatch Samsung Gear S3 and its newer model, the Samsung Galaxy Watch (Fig:5a). A Python program has been developed to process and format data and present characteristics of the tremor under a user friendly and comprehensible format for clinicians. The goal of this system being to identify Parkinson's tremors characteristics qualitatively and quantitatively to highlight global tendencies and help objectively determine effectiveness of diverse treatments against PD tremors. This system was tested on long duration acquisitions (2 and 4 days) with 2 volunteers subject to PD tremors of moderate and high severity and proved to be able to highlight tremor tendencies and characteristics in real conditions. These acquisitions were done in order to experimentally validate the inner-workings of the developed system in real conditions and its capacity to detect PD tremors of moderate and high severity as well as to refine the classification and processing of the data. An example of 4 days acquisition is presented in Figure 5b.
|

The created system allows qualification of tremors in punctual clinical check-ups in the Hospital as well as quantitative formatting of daily tendencies. This system should then allow to highlight the evolution of Parkinson's tremors characteristics throughout the MBSR (Mind-fullness Based Stress Reduction) meditation program which is yet to be undertaken. A protocol is still waiting for validation from the CPP to begin inclusions and conduct the MBSR meditation program, monitored with the developed system.
The software APP of this platform can be found at https://bil.inria.fr/fr/software/view/3565/tab as the PARaKeet Project with the Bil Id: Software_3565.
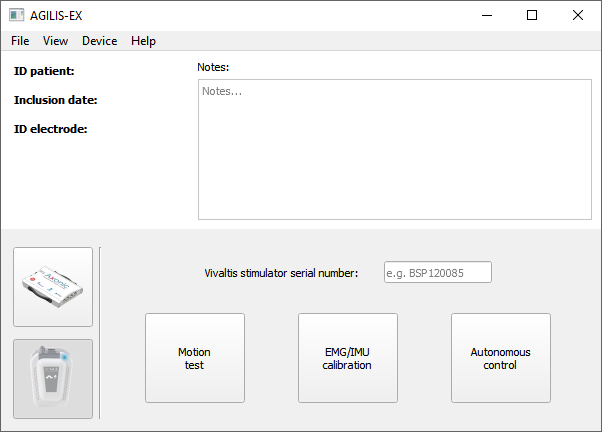
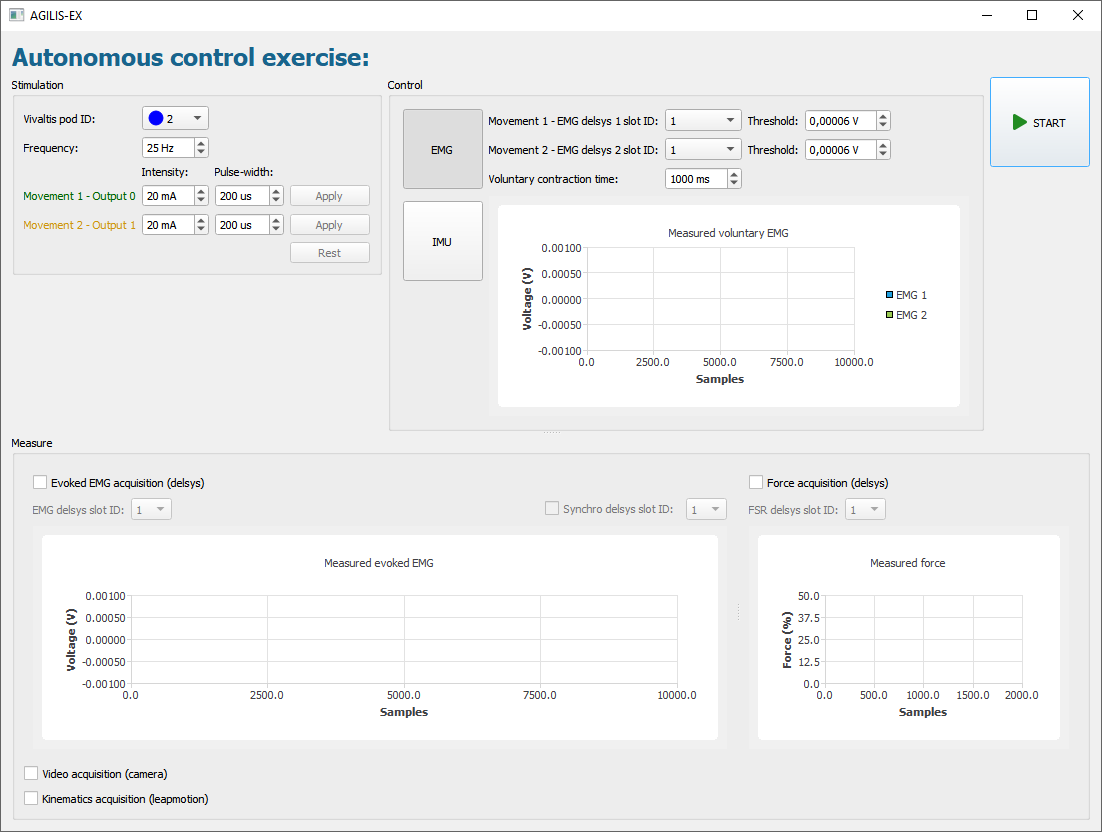
Platform : AGILIS-EX software
Participants : Arthur Hiairrassary, Christine Azevedo Coste, David Guiraud.
The AGILIS-EX software was specially developed as part of the AGILIS project for exploratory clinical trials governed by the ID RCB research protocol: 2019-A02037-50. It allows the configuration and triggering of the stimulation generated by the STIMEP (neural stimulator) or the VIVALTIS (external stimulator) (Fig.6). The stimulation parameters are automatically selected according to predefined configurations (frequency, current and pulse-width) in order to obtain the functional movements of the hand desired by the subject (Fig.7). To detect and interpret patient voluntary movement or contraction to infer the activation or deactivation of the pre-programmed stimulation, it uses measurements from the DELSYS acquisition system (EMG, FSR, trigger).
This medical grade software is compliant with the IEC 62304 (class B).