Section: New Results
Models for real-time motion synthesis
Interactive manipulation of folded paper surfaces
Participant : Damien Rohmer.
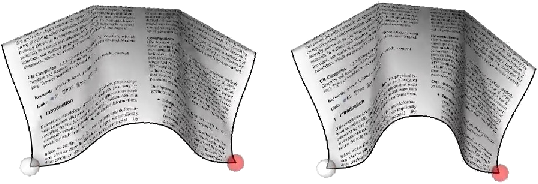
Although physically-based simulation has become very popular to model deformable surfaces such as cloth it is still not applicable to generate animations of creased paper. Due to the stiffness of this uncompressible material and to the complex changes of its mechanical behavior during creasing. As a result, this standard material in every-day life almost never appears in Computer Graphics applications such as movies or video games. Animating creased paper brings two main challenges: First, such surface needs to be deformed while preserving its length in every direction according to its original pattern. Secondly, sharp features, which are not commonly handled in numerical simulators, need to be generated on the surface.
With the master work of Ulysse Vimont, we developped a prototype (as seen in fig. 8 ) of a deformation tool enabling to interactively manipulate a virtual sheet of paper. The approach is a procedural approach based on some geometrical apriori knowledge of behavior of paper under deformation. We plan to extend this work in the next year with a new master student Camille Shreck.
Real-time skinning deformation with contacts
Participants : Marie-Paule Cani, Damien Rohmer.
Skinning deformation based on linear blending or dual quaternion approach is a very popular technique thanks to its fast computation. However, they do not capture the complex behavior of flesh bulging and contact between body parts.
In collaboration with Loic Barthe, Rodolphe Vaillant from IRIT Toulouse, and Gael Guennebaud from LaBRI Bordeaux, we developped a skinnning deformation handling both flesh bulges and collision avoidance.
An implicit surface is first fitted onto the original mesh surface. During the animation, the mesh is deformed using a standard skinning deformation while the implicit surface follows the rigid articulation of the bone. Finaly, the mesh is projected back toward the deformed implicit surface enabling to both compensate for mesh collapse and self collision. This work has been presented in AFIG [10] conference and won the best article award. It has also being accepted for publication in the REFIG Journal.
Particle-based simulation of concrete structures
Participants : Marie Durand, François Faure.
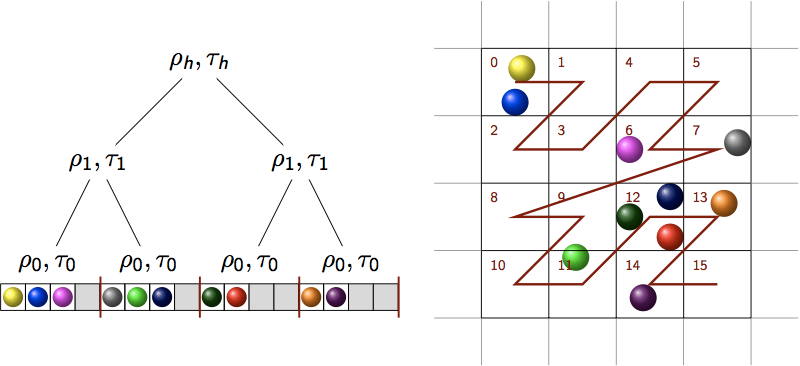
In collaboration with the LIG and L3S-R labs, we have published results on gpu-accelerated simulation of concrete fracturation due to impacts [2] , leading to a speedup factor of about 15 compared to a CPU implementation. This led us to notice that collision detection was the major bottleneck. Consequently, we investigated and published a new incremental sorting method to more efficiently cluster the particles along a Z-curve, by improving the Packed Memory Array data structure for fast updates [15] , as illustrated in Figure 9 . We have proposed a new strategy to efficiently update the sorting, while maintaining a desired fill rate in each branch of the tree structure. Experiments show that our PMA can outperform a compact sorted array for up to 50% particle cell changes per time step.
Collision detection and response
Participant : François Faure.
In collaboration with UBC, Vancouver, we have presented at SIGGRAPH 2012 a new method for image-based contact detection and modeling, with guaranteed precision on the intersection volume [8] . Unlike previous image-based methods, our method optimizes a nonuniform ray sampling resolution and allows precise control of the volume error. By cumulatively projecting all mesh edges into a generalized 2D texture, we construct a novel data structure, the Error Bound Polynomial Image (EBPI), which allows efficient computation of the maximum volume error as a function of ray density. Based on a precision criterion, EBPI pixels are subdivided or clustered. The rays are then cast in the projection direction according to the non-uniform resolution. The EBPI data, combined with ray-surface intersection points and normals, is also used to detect transient edges at surface intersections. This allows us to model intersection volumes at arbitrary resolution, while avoiding the geometric computation of mesh intersections. Moreover, the ray casting acceleration data structures can be reused for the generation of high quality images, as illustrated in Figure 10 .
|
Action representation, segmentation and recognition
Participant : Remi Ronfard.
Following Daniel Weinland's PhD thesis, we published a survey of modern methods for representing, segmenting and recognizing full-body actions in video [32] . A taxonomy of methods is elaborated in that paper, where actions can be represented with local, structured or global features both in time and in space. The potential for future work in grammar-based action recognition is emphasized, with possible applications in corpus-based procedural modeling of actions.
Simulation software architecture
Participants : Ali-Hamadi Dicko, Guillaume Bousquet, Françcois Faure.
|
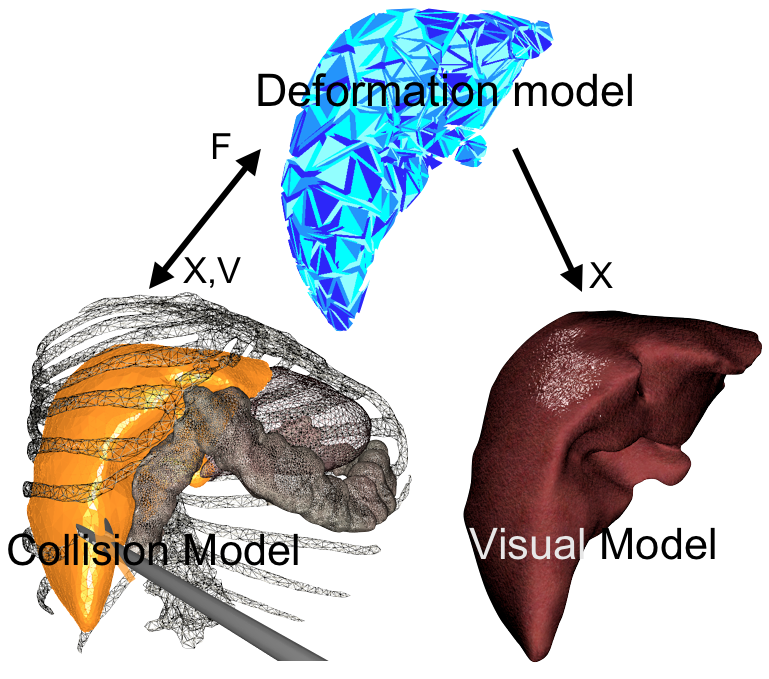
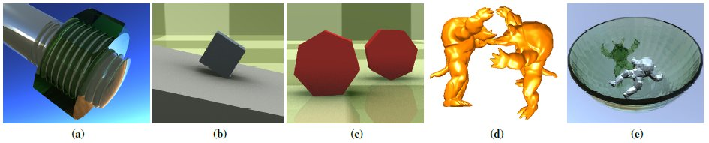
We continue the development of SOFA, the open source simulation library, which is becoming an international reference, and we have published a chapter on it in a Springer book [28] . SOFA facilitates collaborations between specialists from various domains, by decomposing complex simulators into components designed independently and organized in a scenegraph data structure. Each component encapsulates one of the aspects of a simulation, such as the degrees of freedom, the forces and constraints, the differential equations, the main loop algorithms, the linear solvers, the collision detection algorithms or the interaction devices. The simulated objects can be represented using several models, each of them optimized for a different task such as the computation of internal forces, collision detection, haptics or visual display, as illustrated in Figure 11 . These models are synchronized during the simulation using a mapping mechanism. CPU and GPU implementations can be transparently combined to exploit the computational power of modern hardware architectures. Thanks to this flexible yet efficient architecture, SOFA can be used as a test-bed to compare models and algorithms, or as a basis for the development of complex, high-performance simulators
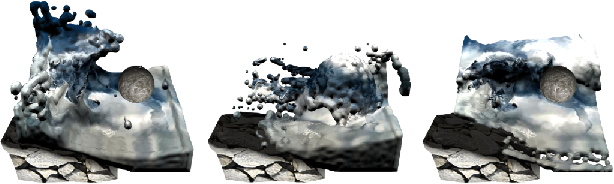
Real time fluid animation on GPU
Participant : Martin Guay.
In collaboration with Manuel Vennier (Maverick, Inria), we developped a simple and fast method to animate fluids on the GPU. Inspired from the classical SPH method (Smooth Particles Hydrodynamics), we express a weekly compressible formulation for the fluid animation. Contrary to standard approaches, we fully developed the formulation on a grid, leading to an efficient GPU implementation. The method replace the implicit formulation of pressure by an explicit one based on density invariance. We therefore propose a method to simulate 3D Eulerian gaseous fluids in a single pass on the GPU. The results published in [22] are less accurate than a standard fluid simulation approach, but lead to real-time fluid-looking models (see fig. 12 ) which are practicable for video games or other interactive applications.
|